[[code]
// DCC Steuerung von Licht und Servos für das Objektes "Firma" mit einem NANO
// Für Objekt zugeschitten Version 1.0 Klaus Schwampe 2019
// Struktur des Programmes meiner Sichchtweise angepast
// Programm auf 3 Servos(F1,F2,F3); 13 LED (F0,F4-F15) Ein/Aus ; 1 LED (F16) Blinken eingestellt
// Grundlage:
// Production 17 Function DCC Decoder Version 5.4 Geoff Bunza 2014,2015,2016
// Software restructuring mods added from Alex Shepherd and Franz-Peter
// With sincere thanks
//#define DECODER_LOADED // "//" entfernen, damit alle CV´s auf jedes POWER UP zurück gesetzt wird
//#define DEBUG // "//" entfernen, um Information auf Serillen Monitor zu sehen
//Decoder_Addresse ==> 31
#include <NmraDcc.h>
#include <SoftwareServo.h>
SoftwareServo servo[17];
#define servo_start_delay 50
#define servo_init_delay 7
#define servo_slowdown 3 // Servo-Loop-Zählergrenze
int servo_slow_counter = 0; // Servoschleifenzähler zum Verlangsamen des Servotransfers
int tim_delay = 500;
int numfpins = 17;
byte fpins [] = {3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19};
const int FunctionPin0 = 3;
const int FunctionPin1 = 4;
const int FunctionPin2 = 5;
const int FunctionPin3 = 6;
const int FunctionPin4 = 7;
const int FunctionPin5 = 8;
const int FunctionPin6 = 9;
const int FunctionPin7 = 10;
const int FunctionPin8 = 11;
const int FunctionPin9 = 12;
const int FunctionPin10 = 13;
const int FunctionPin11 = 14; //A0
const int FunctionPin12 = 15; //A1
const int FunctionPin13 = 16; //A2
const int FunctionPin14 = 17; //A3 & LOAD ACK
const int FunctionPin15 = 18; //A4
const int FunctionPin16 = 19; //A5
NmraDcc Dcc ;
DCC_MSG Packet ;
uint8_t CV_DECODER_MASTER_RESET = 120;
int t; // temp
#define This_Decoder_Address 31
struct QUEUE
{
int inuse;
int current_position;
int increment;
int stop_value;
int start_value;
};
QUEUE *ftn_queue = new QUEUE[16];
struct CVPair
{
uint16_t CV;
uint8_t Value;
};
CVPair FactoryDefaultCVs [] =
{
{CV_MULTIFUNCTION_PRIMARY_ADDRESS, This_Decoder_Address},
{CV_ACCESSORY_DECODER_ADDRESS_MSB, 0},
{CV_MULTIFUNCTION_EXTENDED_ADDRESS_MSB, 0},
{CV_MULTIFUNCTION_EXTENDED_ADDRESS_LSB, 0},
{CV_DECODER_MASTER_RESET, 0},
{30, 0}, //F0 Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{31, 1}, //F0 Rate Blink=Eate,PWM=Rate,Servo=Rate
{32, 1}, //F0 Start Position F0=0
{33, 4}, //F0 End Position F0=1
{34, 1}, //F0 Current Position (aktuelle Position)
{35, 2}, //F1 Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{36, 1}, // Rate Blink=Eate,PWM=Rate,Servo=Rate
{37, 28}, // Start Position Fx=0
{38, 140}, // End Position Fx=1
{39, 28}, // Current Position
{40, 2}, //F2 Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{41, 1}, // Rate Blink=Eate,PWM=Rate,Servo=Rate
{42, 10}, // Start Position Fx=0
{43, 160}, // End Position Fx=1
{44, 10}, // Current Position
{45, 0}, //F3 Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{46, 1}, // Rate Blink=Eate,PWM=Rate,Servo=Rate
{47, 1}, // Start Position Fx=0
{48, 4}, // End Position Fx=1
{49, 28}, // Current Position
{50, 0}, //F4 Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{51, 1}, // Rate Blink=Eate,PWM=Rate,Servo=Rate
{52, 1}, // Start Position Fx=0
{53, 4}, // End Position Fx=1
{54, 1}, // Current Position
{55, 0}, //F5 Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{56, 1}, // Rate Blink=Eate,PWM=Rate,Servo=Rate
{57, 1}, // Start Position Fx=0
{58, 4}, // End Position Fx=1
{59, 1}, // Current Position
{60, 0}, //F6 Config Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{61, 1}, // Rate Blink=Eate,PWM=Rate,Servo=Rate
{62, 1}, // Start Position Fx=0
{63, 4}, // End Position Fx=1
{64, 1}, // Current Position
{65, 0}, //F7 Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{66, 1}, // Rate Blink=Eate,PWM=Rate,Servo=Rate
{67, 1}, // Start Position Fx=0
{68, 4}, // End Position Fx=1
{69, 1}, // Current Position
{70, 0}, //F8 Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{71, 1}, // Rate Blink=Eate,PWM=Rate,Servo=Rate
{72, 1}, // Start Position Fx=0
{73, 4}, // End Position Fx=1
{74, 1}, // Current Position
{75, 0}, //F9 Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{76, 1}, // Rate Blink=Eate,PWM=Rate,Servo=Rate
{77, 1}, // Start Position Fx=0
{78, 4}, // End Position Fx=1
{79, 1}, // Current Position
{80, 0}, //F10 Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{81, 1}, // Rate Blink=Eate,PWM=Rate,Servo=Rate
{82, 1}, // Start Position Fx=0
{83, 4}, // End Position Fx=1
{84, 1}, // Current Position
{85, 0}, //F11 Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{86, 1}, // Rate Blink=Eate,PWM=Rate,Servo=Rate
{87, 1}, // Start Position Fx=0
{88, 4}, // End Position Fx=1
{89, 1}, // Current Position
{90, 0}, //F12 Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{91, 1}, // Rate Blink=Eate,PWM=Rate,Servo=Rate
{92, 1}, // Start Position Fx=0
{93, 4}, // End Position Fx=1
{94, 1}, // Current Position
{95, 0}, //F13 Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{96, 1}, // Rate Blink=Eate,PWM=Rate,Servo=Rate
{97, 1}, // Start Position Fx=0
{98, 4}, // End Position Fx=1
{99, 2}, // Current Position
{100, 0}, //F14 Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{101, 1}, // Rate Blink=Eate,PWM=Rate,Servo=Rate
{102, 1}, // Start Position Fx=0
{103, 4}, // End Position Fx=1
{104, 1}, // Current Position
{105, 0}, //F15 Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{106, 1}, // Rate Blink=Eate,PWM=Rate,Servo=Rate
{107, 1}, // Start Position Fx=0
{108, 4}, // End Position Fx=1
{109, 1}, // Current Position
{110, 1}, //F16 Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{111, 1}, // Rate Blink=Eate,PWM=Rate,Servo=Rate
{112, 1}, // Start Position Fx=0
{113, 100}, // End Position Fx=1
{114, 1}, // Current Position
//für erweiteren Gebrauch in der Zukunft
{115, 0}, //F17 Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{116, 1}, // Rate Blink=Eate,PWM=Rate,Servo=Rate
{117, 28}, // Start Position Fx=0
{118, 50}, // End Position Fx=1
{119, 28}, // Current Position
};
uint8_t FactoryDefaultCVIndex = sizeof(FactoryDefaultCVs)/sizeof(CVPair);
void notifyCVResetFactoryDefault()
{
// Make FactoryDefaultCVIndex non-zero and equal to num CV's to be reset
// to flag to the loop() function that a reset to Factory Defaults needs to be done
FactoryDefaultCVIndex = sizeof(FactoryDefaultCVs)/sizeof(CVPair);
};
void setup() //******************************************************
{
#ifdef DEBUG // wird aufgerufen, wenn oben #define DEBUG freigegeben wird
Serial.begin(115200);
#endif
int i;
uint8_t cv_value;
// initialize the digital pins as outputs
for (int i=0; i < numfpins; i++)
{
pinMode(fpins[i], OUTPUT);
digitalWrite(fpins[i], 0);
}
for (int i=0; i < numfpins; i++)
{
digitalWrite(fpins[i], 1);
delay (tim_delay/10);
}
delay( tim_delay);
for (int i=0; i < numfpins; i++)
{
digitalWrite(fpins[i], 0);
delay (tim_delay/10);
}
delay( tim_delay);
// Setup which External Interrupt, the Pin it's associated with that we're using
// Festlegen, welcher Pin für den External Interrupt verwendet wird
Dcc.pin(0, 2, 0); // PIN 5 => D2 (Nano)
// Call the main DCC Init function to enable the DCC Receiver
// Aufruf der DCC-Init-Hauptfunktion, um den DCC-Empfänger zu aktivieren
Dcc.init( MAN_ID_DIY, 100, FLAGS_MY_ADDRESS_ONLY, 0 );
delay(800);
#if defined(DECODER_LOADED)
if ( Dcc.getCV(CV_DECODER_MASTER_RESET)== CV_DECODER_MASTER_RESET )
#endif
{
for (int j=0; j < FactoryDefaultCVIndex; j++ )
Dcc.setCV( FactoryDefaultCVs[j].CV, FactoryDefaultCVs[j].Value);
digitalWrite(fpins[14], 1);
delay (1000);
digitalWrite(fpins[14], 0);
}
for ( i=0; i < numfpins; i++)
{
cv_value = Dcc.getCV( 30+(i*5)) ;
#ifdef DEBUG
Serial.print(" cv_value: ");
Serial.println(cv_value, DEC) ;
#endif
switch ( cv_value )
{
case 0: // LED on/off
ftn_queue[i].inuse = 0;
break;
case 1: // LED Blink
{
ftn_queue[i].inuse = 0;
ftn_queue[i].current_position = 0;
ftn_queue[i].start_value = 0;
ftn_queue[i].increment = int (char (Dcc.getCV( 31+(i*5))));
digitalWrite(fpins[i], 0);
ftn_queue[i].stop_value = int(Dcc.getCV( 33+(i*5))) ;
}
break;
case 2: //servo
{
ftn_queue[i].current_position =int (Dcc.getCV( 34+(i*5)));
ftn_queue[i].stop_value = int (Dcc.getCV( 33+(i*5)));
ftn_queue[i].start_value = int (Dcc.getCV( 32+(i*5)));
ftn_queue[i].increment = -int (char (Dcc.getCV( 31+(i*5))));
// attaches servo on pin to the servo object
servo[i].attach(fpins[i]);
#ifdef DEBUG
Serial.print("InitServo ID= ");
Serial.println(i, DEC) ;
#endif
servo[i].write(ftn_queue[i].start_value);
for (t=0; t<servo_start_delay; t++)
{
SoftwareServo::refresh();delay(servo_init_delay);
}
ftn_queue[i].inuse = 0;
servo[i].detach();
}
break;
case 3: // Doppelbeleuchtung LED blinkt
{
ftn_queue[i].inuse = 0;
ftn_queue[i].current_position = 0;
ftn_queue[i].start_value = 0;
ftn_queue[i].increment = Dcc.getCV( 31+(i*5));
digitalWrite(fpins[i], 0);
digitalWrite(fpins[i+1], 0);
ftn_queue[i].stop_value = int(Dcc.getCV( 33+(i*5)));
}
break;
case 4: // Einfache gepulste Ausgabe basierend auf der gespeicherten Rate = 10 * Rate in Millisekunden
{
ftn_queue[i].inuse = 0;
ftn_queue[i].current_position = 0;
ftn_queue[i].increment = 10 * int (char (Dcc.getCV( 31+(i*5))));
digitalWrite(fpins[i], 0);
}
break;
case 5: // Fade On (einblenden)
{
ftn_queue[i].inuse = 0;
ftn_queue[i].start_value = 0;
ftn_queue[i].increment = int (char (Dcc.getCV( 31+(i*5))));
digitalWrite(fpins[i], 0);
ftn_queue[i].stop_value = int(Dcc.getCV( 33+(i*5))) *10.;
}
break;
case 6: // NEXT FEATURE to pin
break;
default:
break;
}
}
}
void loop() //**********************************************************************
{
// MUST call the NmraDcc.process() method frequently (MUSS die NmraDcc.process () -Methode häufig aufrufen)
// from the Arduino loop() function for correct library operation (von der Arduino-Funktion loop () für den korrekten Bibliotheksbetrieb)
Dcc.process();
SoftwareServo::refresh();
delay(4);
for (int i=0; i < numfpins; i++)
{
if (ftn_queue[i].inuse==1)
{
switch (Dcc.getCV( 30+(i*5)))
{
case 0:
break;
case 1:
ftn_queue[i].current_position = ftn_queue[i].current_position + ftn_queue[i].increment;
if (ftn_queue[i].current_position > ftn_queue[i].stop_value)
{
ftn_queue[i].start_value = ~ftn_queue[i].start_value;
digitalWrite(fpins[i], ftn_queue[i].start_value);
ftn_queue[i].current_position = 0;
ftn_queue[i].stop_value = int(Dcc.getCV( 33+(i*5)));
}
break;
case 2:
{
if (servo_slow_counter++ > servo_slowdown)
{
ftn_queue[i].current_position = ftn_queue[i].current_position + ftn_queue[i].increment;
if (ftn_queue[i].increment > 0)
{
if (ftn_queue[i].current_position > ftn_queue[i].stop_value)
{
ftn_queue[i].current_position = ftn_queue[i].stop_value;
ftn_queue[i].inuse = 0;
servo[i].detach();
}
}
if (ftn_queue[i].increment < 0)
{
if (ftn_queue[i].current_position < ftn_queue[i].start_value)
{
ftn_queue[i].current_position = ftn_queue[i].start_value;
ftn_queue[i].inuse = 0;
servo[i].detach();
}
}
servo[i].write(ftn_queue[i].current_position);
servo_slow_counter = 0;
}
}
break;
case 3:
ftn_queue[i].current_position = ftn_queue[i].current_position + ftn_queue[i].increment;
if (ftn_queue[i].current_position > ftn_queue[i].stop_value)
{
ftn_queue[i].start_value = ~ftn_queue[i].start_value;
digitalWrite(fpins[i], ftn_queue[i].start_value);
digitalWrite(fpins[i]+1, ~ftn_queue[i].start_value);
ftn_queue[i].current_position = 0;
ftn_queue[i].stop_value = int(Dcc.getCV( 33+(i*5)));
}
i++;
break;
case 4: // Simple Pulsed Output based on saved Rate =10*Rate in Milliseconds
{
ftn_queue[i].inuse = 0;
ftn_queue[i].current_position = 0;
ftn_queue[i].increment = 10 * int (char (Dcc.getCV( 31+(i*5))));
digitalWrite(fpins[i], 0);
}
break;
case 5: // Fade On
break;
case 6: // NEXT FEATURE to pin
break;
default:
break;
}
}
}
}
void notifyDccFunc( uint16_t Addr, DCC_ADDR_TYPE AddrType, FN_GROUP FuncGrp, uint8_t FuncState)
{
switch(FuncGrp)
{
case FN_0_4: //Function Group 1 F0 F4 F3 F2 F1
exec_function( 0, FunctionPin0, (FuncState & FN_BIT_00)>>4 );
exec_function( 1, FunctionPin1, (FuncState & FN_BIT_01));
exec_function( 2, FunctionPin2, (FuncState & FN_BIT_02)>>1);
exec_function( 3, FunctionPin3, (FuncState & FN_BIT_03)>>2 );
exec_function( 4, FunctionPin4, (FuncState & FN_BIT_04)>>3 );
break;
case FN_5_8: //Function Group 1 S FFFF == 1 F8 F7 F6 F5 & == 0 F12 F11 F10 F9 F8
exec_function( 5, FunctionPin5, (FuncState & FN_BIT_05));
exec_function( 6, FunctionPin6, (FuncState & FN_BIT_06)>>1 );
exec_function( 7, FunctionPin7, (FuncState & FN_BIT_07)>>2 );
exec_function( 8, FunctionPin8, (FuncState & FN_BIT_08)>>3 );
break;
case FN_9_12:
exec_function( 9, FunctionPin9, (FuncState & FN_BIT_09));
exec_function( 10, FunctionPin10, (FuncState & FN_BIT_10)>>1 );
exec_function( 11, FunctionPin11, (FuncState & FN_BIT_11)>>2 );
exec_function( 12, FunctionPin12, (FuncState & FN_BIT_12)>>3 );
break;
case FN_13_20: //Function Group 2 FuncState == F20-F13 Function Control
exec_function( 13, FunctionPin13, (FuncState & FN_BIT_13));
exec_function( 14, FunctionPin14, (FuncState & FN_BIT_14)>>1 );
exec_function( 15, FunctionPin15, (FuncState & FN_BIT_15)>>2 );
exec_function( 16, FunctionPin16, (FuncState & FN_BIT_16)>>3 );
break;
case FN_21_28:
break;
}
}
void exec_function (int function, int pin, int FuncState)
{
#ifdef DEBUG
Serial.print("F-Taste: ");
Serial.print(function, DEC) ;
Serial.print(" PIN: ");
Serial.print(pin, DEC) ;
Serial.print(" Zustand ");
Serial.println(FuncState, DEC) ;
#endif
switch ( Dcc.getCV( 30+(function*5)) ) // Config 0=On/Off,1=Blink,2=Servo,3=DBL LED Blink,4=Pulsed,5=fade
{
case 0: // On - Off LED
digitalWrite (pin, FuncState); // FuncState ON = 1 OFF = 0
ftn_queue[function].inuse = 0;
break;
case 1: // Blinking LED
if ((ftn_queue[function].inuse==0) && (FuncState==1))
{
ftn_queue[function].inuse = 1;
ftn_queue[function].start_value = 0;
digitalWrite(pin, 0);
ftn_queue[function].stop_value = int(Dcc.getCV( 33+(function*5)));
}
else
{
if ((ftn_queue[function].inuse==1) && (FuncState==0))
{
ftn_queue[function].inuse = 0;
digitalWrite(pin, 0);
}
}
break;
case 2: // Servo
if (ftn_queue[function].inuse == 0)
{
ftn_queue[function].inuse = 1;
servo[function].attach(pin);
}
if (FuncState==1) ftn_queue[function].increment = char ( Dcc.getCV( 31+(function*5)));
else ftn_queue[function].increment = - char(Dcc.getCV( 31+(function*5)));
if (FuncState==1) ftn_queue[function].stop_value = Dcc.getCV( 33+(function*5));
else ftn_queue[function].stop_value = Dcc.getCV( 32+(function*5));
break;
case 3: // Blinking LED PAIR
if ((ftn_queue[function].inuse==0) && (FuncState==1))
{
ftn_queue[function].inuse = 1;
ftn_queue[function].start_value = 0;
digitalWrite(fpins[function], 0);
digitalWrite(fpins[function+1], 1);
ftn_queue[function].stop_value = int(Dcc.getCV( 33+(function*5)));
}
else
{
if (FuncState==0)
{
ftn_queue[function].inuse = 0;
digitalWrite(fpins[function], 0);
digitalWrite(fpins[function+1], 0);
}
}
break;
case 4: // Pulse Output based on Rate*10 Milliseconds
if ((ftn_queue[function].inuse==0) && (FuncState==1)) //First Turn On Detected
{
digitalWrite(fpins[function], 1);
delay (10*ftn_queue[function].increment);
digitalWrite(fpins[function], 0);
ftn_queue[function].inuse = 1; //inuse set to 1 says we already pulsed
}
else
if (FuncState==0) ftn_queue[function].inuse = 0;
break;
case 5: // Fade On
#define fadedelay 24
if ((ftn_queue[function].inuse==0) && (FuncState==1))
{
ftn_queue[function].inuse = 1;
for (t=0; t<ftn_queue[function].stop_value; t+=ftn_queue[function].increment)
{
digitalWrite( fpins[function], 1);
delay(fadedelay*(t/(1.*ftn_queue[function].stop_value)));
digitalWrite( fpins[function], 0);
delay(fadedelay-(fadedelay*(t/(1.*ftn_queue[function].stop_value))));
}
digitalWrite( fpins[function], 1 );
}
else
{
if ((ftn_queue[function].inuse==1) && (FuncState==0))
{
ftn_queue[function].inuse = 0;
digitalWrite(fpins[function], 0);
}
}
break;
case 6: // Future Function
ftn_queue[function].inuse = 0;
break;
default:
ftn_queue[function].inuse = 0;
break;
}
}
[/code]]
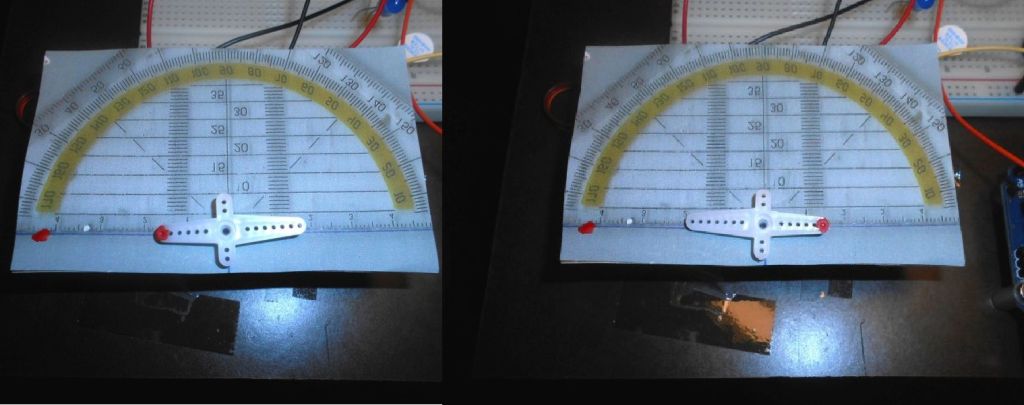
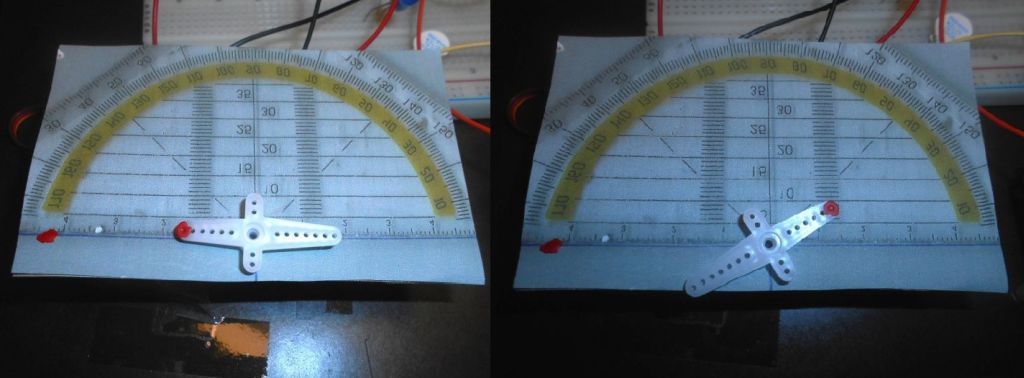
Beim zweiten Objekt habe ich Deine vorgestellte Variante auf meine Wünsche umgestrickt. In der Bastelecke funktionierte alles super. Doch im Zusammenspiel auf der Anlage kam dann die beschriebene Überraschung.
Es kommt noch verflixter. Im nach hinein ist mir folgendes aufgefallen. Setze ich die ESU-Lok auf meine Anlage, werden an meinem Problemobjekt keine Funktionen ausgeführt . Doch etwa 2 Minuten später reagieren alle Funktionen wunderbar. ???
Ja, ich verwende zur Zeit immer noch die Variante 1.1.0. Bei der Fehlersuche zu meinem jetzigen Problem hatte ich schon mal kurzfristig Deine neuste Version benutzt, doch da wurde der zweit und dritte Servo nicht so angesteuert wie vorher. Also erst einmal alles schnell wieder zurück. Die Ursache muß ich dann später noch herausfinden






 ops:
ops:
 . Und dann geht es auch, wenn Du die ESU Lok ansteuerst und mit ihr fährst?
. Und dann geht es auch, wenn Du die ESU Lok ansteuerst und mit ihr fährst?




 und nie eingeschalten.
und nie eingeschalten.