
Hallo miteinander,
ein neues Jahr, ein neues Projekt.
Seit mehreren Jahren habe ich dieses Vorbild
im Auge und ich überlege, ob ein Modell in 1:87 Spurweite 6,5mm Sinn macht. Vom Technischen wäre das Doppelfahrzeug wegen seiner Gesamtlänge und der Anzahl der Achsen für eine sichere Stromversorgung (auch ohne Magnet) sehr gut geeignet. Deshalb meine Frage in die Runde: Kennt jemand ein Modell des Zwilllings in der Spurweite H0f ? Mir ist nur eine Version in H0e bekannt, die mir durch die deutlich sichtbaren Antriebe im Gedächtnis geblieben ist.
Joachim
 Stummis Modellbahnforum
Stummis Modellbahnforumwww.stummiforum.de
Zwergendampf auf BUSCH-Gleisen
![]() #1 von
Feldbahn-Freak
, 24.01.2019 08:50
#1 von
Feldbahn-Freak
, 24.01.2019 08:50
- Feldbahn-Freak
- InterRegioExpress (IRE)
-
Beiträge: 285 Registriert am: 03.05.2011 Ort: Thüringen Spurweite H0e, 0, 00 Stromart DC, Digital, Analog

zuletzt bearbeitet 05.09.2021 | Top
RE: Zwergendampf auf BUSCH-Gleisen
![]() #2 von
felixS
, 24.01.2019 14:37
#2 von
felixS
, 24.01.2019 14:37
Hallo Joachim
Auf dem Minitrains Neuheitenprospekt 2016 war eine Zeichnung des Zwillings in H0e abgebildet. Ob das jemals realisiert wird?
Www.minitrains.eu
Felix
- felixS
- RegionalExpress (RE)
-
Beiträge: 95 Registriert am: 15.12.2017 Spurweite H0, H0e, 1 Stromart AC, Digital, Analog

RE: Zwergendampf auf BUSCH-Gleisen
![]() #3 von
Feldbahn-Freak
, 25.01.2019 06:36
#3 von
Feldbahn-Freak
, 25.01.2019 06:36
Hallo Felix,
danke für Deinen Hinweis auf das Neuheitenblatt von 2016. Hier ist tatsächlich die Doppellokomotive mit den für die Minitrains-Modelle typischen Stromabnehmern skizziert. Dennoch scheint niemand bisher ein Modell dieses Vorbildes in H0f gefunden zu haben. Es bleibt bei mir die Hoffnung, dass ein Eigenbau Sinn macht.
Joachim
- Feldbahn-Freak
- InterRegioExpress (IRE)
-
Beiträge: 285 Registriert am: 03.05.2011 Ort: Thüringen Spurweite H0e, 0, 00 Stromart DC, Digital, Analog
RE: Zwergendampf auf BUSCH-Gleisen
![]() #4 von
felixS
, 25.01.2019 08:53
#4 von
felixS
, 25.01.2019 08:53
Hallo Joachim
Bei Shapeways hab ich 3d Druckmodelle gesehen! Oder sind die von Dir?
https://www.shapeways.com/shops/dampfross
Felix
- felixS
- RegionalExpress (RE)
-
Beiträge: 95 Registriert am: 15.12.2017 Spurweite H0, H0e, 1 Stromart AC, Digital, Analog
RE: Zwergendampf auf BUSCH-Gleisen
![]() #5 von
HO-Senior
, 25.01.2019 12:54
#5 von
HO-Senior
, 25.01.2019 12:54
Hallo Joachim,
auch ich habe die Ankündigung von MiniTrains gesehen und würde das Erscheinen dieses Lok-Pärchens sehr begrüßen.
Doch von anderer "gut unterrichteter" Seite war zu erfahren, daß es bei dieser Lok wohl Schwierigkeiten mit der Unterbringung des Motors geben soll
und ein Erscheinen deshalb sehr fraglich ist.
Stattdessen könnte ich mir vorstellen, daß das Modell einer Feldbahn-Mallet-Lok möglich wäre, wie sie wohl beim Frankfurter Feldbahnmuseum
entstehen soll.
Schöne Grüße
Reinhard
- HO-Senior
- InterCity (IC)
-
Beiträge: 640 Registriert am: 29.07.2005
RE: Zwergendampf auf BUSCH-Gleisen
![]() #6 von
Feldbahn-Freak
, 26.01.2019 09:08
#6 von
Feldbahn-Freak
, 26.01.2019 09:08
Zitat
Hallo Joachim
Bei Shapeways hab ich 3d Druckmodelle gesehen! Oder sind die von Dir?
https://www.shapeways.com/shops/dampfross
Felix
Hallo Felix, ja - die habe ich verzapft und ich habe versucht maßstäblich zu bleiben.
[quote=H0-Senior]
Doch von anderer "gut unterrichteter" Seite war zu erfahren, daß es bei dieser Lok wohl Schwierigkeiten mit der Unterbringung des Motors geben soll
und ein Erscheinen deshalb sehr fraglich ist.
[/quote]
Ein Gedankenspiel von meiner Seite dazu. Für die Minitrains-Modelle habe ich mal grob den Maßstab 1:76 angesetzt und virtuell ein Minitrains-Fahrwerk des Artikels mit der Nummer 1001 hineingesetzt. Der optische Eindruck wir bei diesem Modell doch von den senkrecht stehenden Motor getrübt. Aber das muß jeder selbst beurteilen.
Ich werde zunächst die Umsetzung eines reinen 1:87 Modell für die BUSCH-Gleise weiterverfolgen, bei dem der Motor nicht sichtbar sein soll.
Joachim
- Feldbahn-Freak
- InterRegioExpress (IRE)
-
Beiträge: 285 Registriert am: 03.05.2011 Ort: Thüringen Spurweite H0e, 0, 00 Stromart DC, Digital, Analog
RE: Zwergendampf auf BUSCH-Gleisen
![]() #7 von
Stader Gleisbauer
, 27.01.2019 10:10
#7 von
Stader Gleisbauer
, 27.01.2019 10:10
mOin joachim,
interessantes Projekt.
Zu dem 3D-Modell bei Shapeways habe ich eine Frage: Ist die Lok ein komplettes Standmodell (also entweder am Stück fertig gedruckt oder alle Teile enthalten)?
Die würde nämlích ein schönes Ladegut abgeben.
MfG Christoph
- Stader Gleisbauer
- InterRegio (IR)
-
Beiträge: 206 Registriert am: 05.12.2015 Ort: Stade Spurweite H0, H0e Stromart DC, Digital

RE: Zwergendampf auf BUSCH-Gleisen
![]() #8 von
Feldbahn-Freak
, 27.01.2019 11:35
#8 von
Feldbahn-Freak
, 27.01.2019 11:35
[quote="Stader Gleisbauer" post_id=1931904 time=1548580259 user_id=26163]
mOin joachim,
interessantes Projekt.
Zu dem 3D-Modell bei Shapeways habe ich eine Frage: Ist die Lok ein komplettes Standmodell (also entweder am Stück fertig gedruckt oder alle Teile enthalten)?
Die würde nämlích ein schönes Ladegut abgeben.
MfG Christoph
[/quote]
Hallo Christoph,
diese Teile sind, wie Du schon vermutet hast, "aus einem Stück" gedruckt. Zur Farbbehandlung habe ich immer gern Instant Rust from Triangle Coatings, Inc. verwendet. Als Beispiel mal ein Bild eines H0f B-Kupplers mit dieser Farbgebung. Ich würde, falls Du nur eine Lok (Illing) als Ladegut planst das etwas höhere Fahrzeug (Lok B) wählen. Bitte reiß mir den Kopf nicht ab, wenn es beim Druck zu Verzögerung kommt, das Modell habe ich erst ganz neu eingestellt.
Joachim
- Feldbahn-Freak
- InterRegioExpress (IRE)
-
Beiträge: 285 Registriert am: 03.05.2011 Ort: Thüringen Spurweite H0e, 0, 00 Stromart DC, Digital, Analog
RE: Zwergendampf auf BUSCH-Gleisen
![]() #9 von
Stader Gleisbauer
, 27.01.2019 12:05
#9 von
Stader Gleisbauer
, 27.01.2019 12:05
Moin Joachim,
Danke für die Info. Und keine Bange wegen Verzögerungen, so eilig ist das gerade nicht für mich. Aber schön daß es den Zwilling wenigstens als 3D-Druck gibt.
Planst Du da noch mehr in Richtung HFB?
MfG Christoph
- Stader Gleisbauer
- InterRegio (IR)
-
Beiträge: 206 Registriert am: 05.12.2015 Ort: Stade Spurweite H0, H0e Stromart DC, Digital
RE: Zwergendampf auf BUSCH-Gleisen
![]() #10 von
Feldbahn-Freak
, 30.01.2019 11:20
#10 von
Feldbahn-Freak
, 30.01.2019 11:20
Zitat von Stader Gleisbauer
Planst Du da noch mehr in Richtung HFB?
MfG Christoph
Hallo Christoph,
meine heimliche Vorliebe gehört mehr den "kleinen" B-Kupplern zB. von O&K. Die HF beginnt ja nach meinen Informationen erst so ab 50 PS. Aber zunächst gilt mein Blick der Feldbahndampflok HF Zwilling.
Im Schritt 1
habe ich mal die erforderlichen Informationen zum Vorbild gesucht. Anders als bei vielen anderen Vorbildern gibt es zB. HIER für kleines Geld alles, was man als Modellbauer für dieses Vorbild braucht.
Im Schritt 2
werden nun alle Maße "in den Raum" gestellt. Dabei habe ich zunächst alle Maße so gelassen, wie sie sind und noch keine Rücksicht auf die Technologie beim Umsetzen in ein Modell der Spurweite 6,5 mm gemacht. Wenn man die Steuerungsteile betrachtet, wird klar, was ich meine. Die kann man so zierlich nicht maßstabsgetreu umsetzen.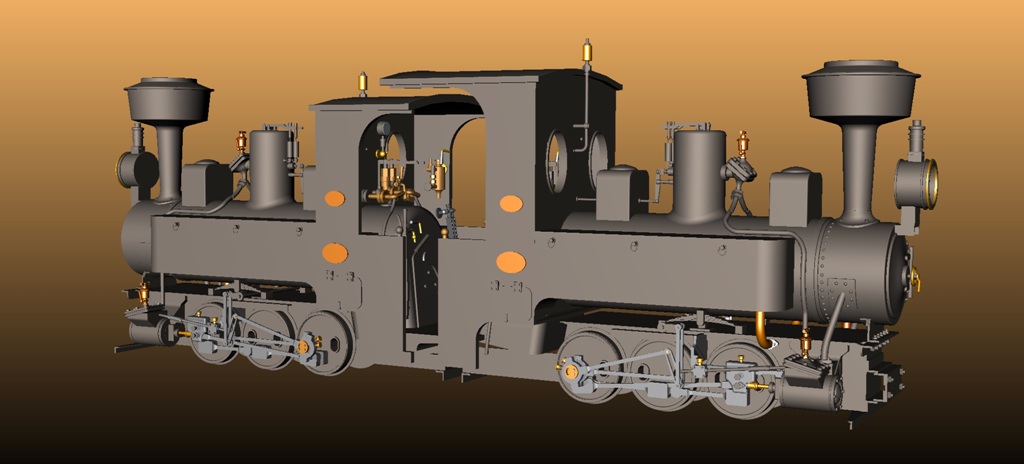
Im Schritt 3
habe ich nun begonnen, mir Gedanken um die Platzverhältnisse zu machen. Der Motor soll im Kessel verrschwinden, so könnte es aussehen.
Es passt ein Motor Durchmesser 8mm Länge 16 mm gut hinein. Die Antriebe der Fa. Maxon (im Bild zu sehen) gibt es für 3 Volt aber auch für 12 Volt. Sogar für eine bescheidene Schwungmasse ist noch Platz vorhanden.
Im nächsten Schritt kümmere ich mich um die Untersetzung, damit der Zwilling keine "Rennsemmel" wird.
Joachim
- Feldbahn-Freak
- InterRegioExpress (IRE)
-
Beiträge: 285 Registriert am: 03.05.2011 Ort: Thüringen Spurweite H0e, 0, 00 Stromart DC, Digital, Analog
zuletzt bearbeitet 28.05.2021 | Top
RE: Zwergendampf auf BUSCH-Gleisen
![]() #11 von
Lanz-Franz
, 30.01.2019 13:24
#11 von
Lanz-Franz
, 30.01.2019 13:24
Hallo Joachim.
Die Vorarbeiten zu deinem Projekt sind ja schon weit vorangeschritten. 
Werden beide Loks motorisiert?
mfG Werner
mfG Werner -und immer 50mA Reserve imTrafo 
Schmalspur 1:87 : Die Birkenbahn https://www.stummiforum.de/viewtopic.php?f=50&t=133452
Gartenbahn : https://www.stummiforum.de/viewtopic.php?...578793#p1578793
- Lanz-Franz
- InterCityExpress (ICE)
-
Beiträge: 2.343 Registriert am: 19.01.2016 Ort: zwischen D-dorf und Köln Gleise diverse Spurweite H0m, G Steuerung z21;Massoth_1210Z;RC Stromart Digital

RE: Zwergendampf auf BUSCH-Gleisen
![]() #12 von
Feldbahn-Freak
, 01.02.2019 14:06
#12 von
Feldbahn-Freak
, 01.02.2019 14:06
Zitat
Werden beide Loks motorisiert?
Hallo Werner,
die Frage nach der Motorisierung für beide Fahrzeuge ist berechtigt. Immerhin kostet ein eisenloser Antrieb ca. 70 EUR. Dafür bekommt man aber in dieser Preisklasse neben der elektrischen Leistung ein erstaunlich hohes Drehmoment. Gerade bei den kleinen Modellen ist es wichtig, das eine kleine mechanische Unwegsamkeit nicht gleich zum Stillstand bei der Langsamfahrt führt. Eine 2. Wellen (für eine Schwungmasse) und eine gute Befestigungsmöglichkeit durch ein Feingewinde sind weitere Argumente für die etwas kostspieligeren Motoren.
Aus Kostengründen liegt die Variante mit nur einem Motor vorn. Dagegen sprechen aber gleich mehrere Gründe:
1. Der Antrieb ist auf eine Gelenkwelle zwischen den Fahrzeugen festgelegt.
2. Die Gelenkwelle bedingt einen Antrieb der Achsen mit einer Schnecke/Rad-Kombination.
3. Die Schnecke/Rad-Kombination wird in den meisten Fällen die Welle für die Schnecken über den Achsen vorsehen. Die Gelenkwelle wäre daher zwischen den beiden Fahrzeugen deutlich sichtbar .
4. Die Gelenkwelle muß die Funktion der beweglichen Verbindung zwischen den Fahrzeugen als eine Art Kinematik so abbilden, dass eine Doppelkurve ohne dazwischenliegendes Geradenstück fehlerfrei durchfahren wird. Die Überlegung gilt besonders bei den wirklich engen Kurvenstücken der BUSCH-Gleise! Die Möglichkeit eine längenverstellbaren Gelenkwelle mit einer Extra-Kinematik habe ich aus Aufwandsgründen abgewählt. Idealerweise wäre die bewegliche Verbindung zwischen den Fahrzeugen in Höhe der Achsen anzusiedeln. Das ist nicht der Fall.
Soweit meine Überlegungen, die letztlich auf eine Variante mit je einem Motor führen. Die Fahrzeuge wären dann auch als Illing einsetzbar.
Was meint Du dazu ?
Joachim
- Feldbahn-Freak
- InterRegioExpress (IRE)
-
Beiträge: 285 Registriert am: 03.05.2011 Ort: Thüringen Spurweite H0e, 0, 00 Stromart DC, Digital, Analog
RE: Zwergendampf auf BUSCH-Gleisen
![]() #13 von
Lanz-Franz
, 03.02.2019 08:42
#13 von
Lanz-Franz
, 03.02.2019 08:42
Hallo Joachim
Zitat
Was meint Du dazu ?
Kann ich eigentlich nichts zu sagen, wiel ich mich da überhaupt nicht auskenne.
Ich wußte bis gestern noch nicht was Illing bedeutet. Das es diese Kombination gibt, und man die Loks trennen kann und dann einzeln einsetzen kann.
Ich kannte nur den Typ Fairlie.
Ich bin auf die Frage gekommen, weil es von Busch eine Art offene Motordraisine gibt. Diese ist als Modell unmotorisiert und hat einen Bauzugwagen im Zugverbund hat, in dem der Motor untergebracht ist.
mfG Werner
mfG Werner -und immer 50mA Reserve imTrafo
Schmalspur 1:87 : Die Birkenbahn https://www.stummiforum.de/viewtopic.php?f=50&t=133452
Gartenbahn : https://www.stummiforum.de/viewtopic.php?...578793#p1578793
- Lanz-Franz
- InterCityExpress (ICE)
-
Beiträge: 2.343 Registriert am: 19.01.2016 Ort: zwischen D-dorf und Köln Gleise diverse Spurweite H0m, G Steuerung z21;Massoth_1210Z;RC Stromart Digital
RE: Zwergendampf auf BUSCH-Gleisen
![]() #14 von
GMWE
, 03.02.2019 10:54
#14 von
GMWE
, 03.02.2019 10:54
Hallo Joachim,
die Variante mit 2 Antrieben ist ungleich aufwendiger, bringt aber beim Betrieb des Zwillings deutliche Vorteile.
Keine sichtbaren Getriebeteile, eine Trennung in zwei betriebsfähige Loks jederzeit möglich, im Gegenbogen
keine Gelenkwelle, die da stören könnte, sondern eine normale Kupplung auf Achsenhöhe.
Und eine gemeinsame digitale Ansteuerung der beiden Motore sollte auch kein Problem darstellen.
Und wegen der Faulis oder Maxons kannst Du ja ein Crowdfunding starten.......... 
Gruß, Peter
Schmalspur1
- GMWE
- InterRegio (IR)
-
Beiträge: 140 Registriert am: 07.03.2013 Spurweite H0m Stromart DC, Analog

RE: Zwergendampf auf BUSCH-Gleisen
![]() #15 von
md95129
, 03.02.2019 22:21
#15 von
md95129
, 03.02.2019 22:21
Hallo Joachim,
ein ziemlich kompliziertes Unternehmen. Falls Du doch mit einem Motor auskommen willst, Du kannst ein Kardangelenk bauen, das auf einer Seite praktisch kein Laengsspiel hat, aber auf der anderen Seite in einem Schlitz gefuehrt ist. Dies sollte man sehr klein bauen koennen. Kleine Messingkugeln lassen sich gut mit zwei Bohrungen im 90Grad Winkel versehen http://www.buntbahn.de/modellbau/viewtop...er=asc&start=80. Damit wuerdest Du Platz fuer Decoder und evtl. Kondensatoren schaffen koennen. Kondensatoren sind m.E. sowieso einer Schwungmasse vorzuziehen, da dieselbe bei Kriechfahrt ziemlich wirkungslos ist. Ich bin uebrigens im Augenblick dabei, eines meiner Erstlingswerke (MEG52) zu digitalisieren. Ich habe in einem versteckten Winkel noch einen meiner Eigenbaudecoder gefunden und zusammen mit einem 1F - Kondensator (6,3mm Durchmesser und 8mm lang) passt das in mein nicht fuer Digitalisierung vorgesehenes Gehaeuse.
Regards
Henner,
ex-Donkey Doktor der EDH Lumber
Schamlose Selbstbeweihräucherung: Eigenbauten eines alten Neulings.
US Waldbahnen/Echtdampf-Eigenbau
- md95129
- EuroCity (EC)
-
Beiträge: 1.073 Registriert am: 15.01.2017 Ort: Berlin Gleise IIm Echtdampf,H0m Steuerung DCC Eigenbau Stromart Digital
RE: Zwergendampf auf BUSCH-Gleisen
![]() #16 von
Feldbahn-Freak
, 08.02.2019 13:11
#16 von
Feldbahn-Freak
, 08.02.2019 13:11
Vielen Dank an Werner, Peter und Henner für Euere Hilfestellung, bei meinen Überlegungen zu diesem Projekt.
Werners Überlegung, den Antrieb in ein gesondertes (Antriebs)Fahrzeug auszulagern macht eigentlich nur Sinn für die ganz "Kleinen" wie zB. eine Draisine. Im Prinzip hat das ja Werner auch zum Ausdruck gebracht, indem er ein entsprechendes Beispiel genannt hat.
Henners Überlegungen zu nur einem Motor bieten den Vorteil, dass Platz für eine Digitalisierung sogar mit Speicherbaustein frei wird. Aber diesen Einsatzfall habe ich nicht im Auge. Die Digitalisierung als Option bleibt mit modernen, sehr kleinen Decodern auch mit 2 Motoren offen. Diese im Verbund zu betreiben habe ich schon einmal bei meiner Sächsischen IIK (neu) realisiert. Die Unterbringung eines Speicherbausteines hat untergeordnete Bedeutung, weil das Fahrzeug zwischen dem ersten und dem letzten Stromabnehmer etwa konfortable 60 mm misst.
Ich bin mit Peters Bemerkungen zu der Version mit den 2 Motoren zu 100% einverstanden. Das deckt sich mit meinen Erfahrungen. Gerade die recht kleinen Fahrzeuge würden mit ihrem geringen Gewicht und den engen Radien der BUSCH-Gleise (115mm) eine Herausforderung für den Gelenkwellenantrieb darstellen, womit ich nicht gesagt haben will, dass es nicht machbar wäre. Die Gelenkwelle werde ich für eine größere Fahrzeugversion in 0i im Hinterkopf behalten.
Doch nun zum Schritt 4 ....
die Festlegung der Untersetzung für das Getriebe. Zunächst einmal ein Blick auf das Vorbild. Die Konstrukteure des Zwillings haben da, wenn man veröffentlichten Daten glauben darf, etwa 20 Km/h veranschlagt. Die Höchstgeschwindigkeit wird aber auch und vorallem von den konkreten Streckenverhältnissen abhängen. Als Beispiel hierfür sei die zivile Nutzung des Zwillings nach einem verheerenden Großbrand in Brotterode im Jahre 1895 zum raschen Wiederaufbau genannt. Hier wurde in nur 37 Tagen eine Strecke von ca. 14 km gebaut, ein wirklich schönes Beispiel dafür, was die Vorzüge der Feldbahn gegenüber ihren größeren Schwestern ausmacht. Für diese konkrete Strecke wird eine Höchstgeschwindigket von 12 km/h angegeben, die Gleisradien werden mit 30m beziffert. Diese Höchstgeschwindigkeit soll in meine weiteren Überlegungen eingehen.
Als nächstes lohnt ein Blick in die Datenblätter des gewählten Maxon-Motors RE 0816 2. Die Leerlaufdrehzahl bei 12 Volt beträgt demnach 15600 u/min.
Ich habe folgende Werte gewählt:
Höchstgeschwindigkeit des Vorbildes:
15 km/h (Wir haben ja einen Fahrregler  )
)
Treibradduchmesser des Vorbildes:
580 mm
Höchstdrehzahl des Motors unter realen Betriebsbedingungen:
70% der Leerlaufdrehzahl ca. 11000 u/min.
Das sind die drei Werte, mit denen ich die Untersetzung festlegen will. Was meint ihr ?
Viele Grüße
Joachim
- Feldbahn-Freak
- InterRegioExpress (IRE)
-
Beiträge: 285 Registriert am: 03.05.2011 Ort: Thüringen Spurweite H0e, 0, 00 Stromart DC, Digital, Analog
RE: Zwergendampf auf BUSCH-Gleisen
![]() #17 von
Stader Gleisbauer
, 08.02.2019 18:16
#17 von
Stader Gleisbauer
, 08.02.2019 18:16
Moin Joachim,
nagele mich bitte nicht daran fest, aber ich meine in der Literatur etwas von 20 km/h auf gut liegenden Gleisen gelesen zu haben. Das hat aber eher Strecken wie die Übungsbahnen in Rehagen-Klausdorf (und später dazu Hanau) oder den Ernteeinsatz auf der MPSB betroffen.
MfG Christoph
- Stader Gleisbauer
- InterRegio (IR)
-
Beiträge: 206 Registriert am: 05.12.2015 Ort: Stade Spurweite H0, H0e Stromart DC, Digital
RE: Zwergendampf auf BUSCH-Gleisen
![]() #18 von
GMWE
, 09.02.2019 01:16
#18 von
GMWE
, 09.02.2019 01:16
Hallo Joachim,
die 70% von der Leerlaufdrehzahl entsprechen haargenau meinen Erfahrungen bei diesen Motoren. Du kannst ganz
beruhigt deine Getriebeuntersetzung mit 11000 U/min beginnen.
Und ob nun 12, 15 oder 20 Kmh Höchstgeschwindigkeit erreicht werden sollen - das ist eine
Frage der Getriebeauslegung und bleibt dir überlassen. Mit der Lastdrehzahl und dem Raddurchmesser
hast Du ja die entscheidende Berechnungsgrundlage.
Ich wünsche dir Spaß (nicht vergessen!) und Erfolg.
Gruß, Peter
Schmalspur1
- GMWE
- InterRegio (IR)
-
Beiträge: 140 Registriert am: 07.03.2013 Spurweite H0m Stromart DC, Analog
RE: Zwergendampf auf BUSCH-Gleisen
![]() #19 von
Feldbahn-Freak
, 16.02.2019 13:51
#19 von
Feldbahn-Freak
, 16.02.2019 13:51
Zitat von Stader Gleisbauer" post_id=1937961 time=1549646208 user_id=26163]
nagele mich bitte nicht daran fest, aber ich meine in der Literatur etwas von 20 km/h auf gut liegenden Gleisen gelesen zu haben.
MfG Christoph
[/quote]
Hallo Christoph,
das passt doch, die Lok ist für max. 20km/h gebaut, manche Gleise (Brotterode, historisch) lassen aber weniger zu - wir sind uns einig
[quote="GMWE
die 70% von der Leerlaufdrehzahl entsprechen haargenau meinen Erfahrungen bei diesen Motoren.
Prima, dann lege ich mal mit der Berechnung los:
- 15 km/h das entspricht ca. 2,28 U/sec für die Räder des Fahrzeuges
- Die Drehzahl des MAXON-Motors unter Teillast von 11 000 U/min muß also mit etwa 1:86 untersetzt werden.
Ich wähle einfach mal 1:80
Die Raumaufteilung für Zahnräder und Schnecken Modul 0,2 würde dann so aussehen:
oder eben so:
Das Rote soll die Kugellager darstellen.
Beide Versionen sind so gestaltet, dass der Antrieb mit seinen Zahnrädern vollstandig im Fahrzeug verschwinden. Für welche Antriebsart ich mich entscheide, kann ich noch nicht sagen.
Die Version mit den Schnecken über den Antriebsachsen bietet eine schöne Möglichkeit eine Kippachse mit den Drehpunkt an der richtigen Stelle zu bauen. Als Minuspunkt dieser Version würde ich die Geräuschentwicklung sehen.
Hier punktet eher die Version mit der Schnecke auf der Motorwelle. Die Gestaltung der Kippachse ist mit einer geringfügigen Verdrehung der Stirnräder verbunden. Hier sehe ich die Notwendigkeit den Drehwinkel der Kippachse zu begrenzen!
Bei beiden Versionen habe ich die Mittelachse vom Antrieb ausgeschlossen. Die würde ich über die Treibstangen mitdrehen lassen.
Was meint ihr zu meinen Vorschlägen?
Joachim
- Feldbahn-Freak
- InterRegioExpress (IRE)
-
Beiträge: 285 Registriert am: 03.05.2011 Ort: Thüringen Spurweite H0e, 0, 00 Stromart DC, Digital, Analog
RE: Zwergendampf auf BUSCH-Gleisen
![]() #20 von
GMWE
, 17.02.2019 16:40
#20 von
GMWE
, 17.02.2019 16:40
Hallo Joachim,
es gäbe noch eine 3. Variante, bei der ein Riemenantrieb von der Motorwelle auf die
Schneckenwelle das Heulen eliminiert. So könntest Du die Dreipunktlagerung problemlos
installieren und kannst auch das Zahnradgrab weglassen.
Gruß, Peter
Schmalspur1
- GMWE
- InterRegio (IR)
-
Beiträge: 140 Registriert am: 07.03.2013 Spurweite H0m Stromart DC, Analog
RE: Zwergendampf auf BUSCH-Gleisen
![]() #21 von
Feldbahn-Freak
, 25.02.2019 07:05
#21 von
Feldbahn-Freak
, 25.02.2019 07:05
Zitat
Hallo Joachim,
es gäbe noch eine 3. Variante, bei der ein Riemenantrieb von der Motorwelle auf die
Schneckenwelle das Heulen eliminiert. So könntest Du die Dreipunktlagerung problemlos
installieren und kannst auch das Zahnradgrab weglassen.
Gruß, Peter
Ja, stimmt. Wie ich höre, haben sich die Eigenschaften der Antriebsriemen mittlerweise so verbessert, dass man auch bei den kleinen Fahrzeugen über einen Einsatz nachdenken kann. Ich würde da selbst mal gern herumprobieren. Es ist ja bei den ganz "Kleinen" wichtig, dass der Antrieb beim Anfahren, also im absolut unteren Drehzahlbereich, schon seinen Dienst verrichtet (Ich rede besonders vom Analogbetrieb). Die Riemen gibt in den verschiedensten Größen. Peter (und natürlich auch die anderen Mitleser), hast Du/ihr schon eigenen (möglichst positive) Erfahrungen sammeln können ?
Die Punkte, die mich und ich denke auch viele Mitleser interessieren sind:
- Welche Querschnittsform ist für welchen Einsatz die geeignetste ?
- Welche Größen gibt es ? (Querschnitt, Umfang/Länge) ?
- Welche Materialeigenschaften sind für welchen Einsatz die besten ?
- Was sollte man beim Kauf oder der Herstellung der Riemenscheiben beachten (Riemenquerschnittsform und die passende Form der Rille) ?
- Was mit mit der Riemenspannung ?
- Was ist mit der Alterung der Riemen (Riemenspannung/Aushärtung des Materials) ?
- Mit welchen konkreten Produkten konntest Du/Ihr schon positive Erfahrungen sammeln ?
So nun habe ich aber genug gefragt -  ops: und ich gebe Ruhe und ich hoffe auf Hilfe.
ops: und ich gebe Ruhe und ich hoffe auf Hilfe.
Joachim
- Feldbahn-Freak
- InterRegioExpress (IRE)
-
Beiträge: 285 Registriert am: 03.05.2011 Ort: Thüringen Spurweite H0e, 0, 00 Stromart DC, Digital, Analog
RE: Zwergendampf auf BUSCH-Gleisen
![]() #22 von
GMWE
, 25.02.2019 15:12
#22 von
GMWE
, 25.02.2019 15:12
Hallo Joachim, (Vorsicht! Viel Text!)
jetzt bereue ich zum ersten Mal, daß ich im vorigen Jahr meine HP gelöscht habe.
Ich hatte dort einiges zu den Vor- und Nachteilen des Riemenantriebes geschrieben.
Hier mal der Versuch eines Extraktes aus der Erinnerung:
1. In der Größenordnung, von der wir hier reden, kommt nur ein Rundriemenantrieb
in Frage. Zahnriemen mit einem Durchmesser von ca. 10 mm habe ich noch nicht gesehen.
Außerdem haben sie sehr wahrscheinlich für unsere Verhältnisse einen zu hohen
Reibungswiderstand. Flachriemen gingen theoretisch auch, sie benötigen aber ein flaches
Riemenrad, ansonsten haben sie das ständige Bestreben, an den Wänden hochzuklettern.
Flache Riemenräder benötigen eine konvexe Lauffläche,um den Riemen zu zentrieren.
Trotzdem ist das Laufverhalten in der Praxis instabil, da der Riemen aus unterschiedlichsten
Gründen runter rutschen kann.
Eine der möglichen Bezugsquellen:
https://www.sb-modellbau.com/index.php?p...000514/00000517
2. Über die Qualität dieser O-Ringe kann ich mich nur positiv äußern. Die Hersteller schließen
zwar eine mögliche Dehnung über die Jahre nicht aus, bei mir laufen aber Fahrzeuge seit
ca. 10 Jahren mit diesen Riemen, ohne daß sich bisher eine spürbare Dehnung gezeigt hat.
Das gilt auch für die Alterung des Materials. In diesem Zusammenhang gleich eine Bemerkung
zum Dehnschlupf (Spannung des Riemens vor dem Losbrechmoment des Motors): In der
praktischen Erprobung ist ein Dehnschlupf bei optimaler Riemenspannung absolut nicht zu bemerken.
Wenn man aber die Riemenspannung erhöht, dann muß man mit einem deutlichen Anfahrruck rechnen.
3. Ich gehe davon aus , daß Du die Riemenräder selbst drehst. Dann solltest Du als Lauffläche
für den Rundriemen auch eine halbrunde Nut eindrehen und zwar so, daß sie dem Durchmesser
des Rundriemens entspricht. 
Dadurch wird der Riemen auch von den Seiten der Halbrundnut mitgenommen. Er hat also als
Reibungsfläche nicht nur den Boden der Nut. Das läßt ein Reduzierung der Riemenspannung zu.
4. Für die Riemenspannung gilt: Das Optimum ist kurz vor dem Durchrutschen des Riemens. Jede
höhere Spannung erhöht auch die Reibung der Achsen in ihren Lagern und verzögert das
Losbrechmoment des Motors. Das macht sich naturgemäß beim Anfahren negativ bemerkbar.
Man sollte aber auch eine sicherheitsrelevante Spannung einstellen, um z.B. bei verharztem Getriebe,
Steigungsstrecken u.a.m. noch "zugkräftig" zu sein.
Es gilt also einen Riemen zu finden, der diesen Bedingungen - verursacht von der Konstruktion des
Getriebes bzw. dem Abstand der Wellen - entspricht. Um die Auswirkungen der Riemenspannung zu
reduzieren sind Kugellager auf den beteiligten Achsen unbedingt erforderlich.
Bei Triebfahrzeugen mit montierten Schwungmassen ist der größte Nachteil der verringerte Auslauf
nach Abschaltung der Spannung verglichen mit einem Stirnzahnradgetriebe. Hierfür ist die Riemenspannung
verantwortlich.
Bei digitaler Steuerung kann man diesen Umstand aber elektronisch beheben, so daß eigentlich nur
Vorteile übrig bleiben.
Gruß, Peter
Schmalspur1
- GMWE
- InterRegio (IR)
-
Beiträge: 140 Registriert am: 07.03.2013 Spurweite H0m Stromart DC, Analog
RE: Zwergendampf auf BUSCH-Gleisen
![]() #23 von
volkerS
, 25.02.2019 15:25
#23 von
volkerS
, 25.02.2019 15:25
Hallo Joachim,
- Welche Querschnittsform ist für welchen Einsatz die geeignetste ? Flachriemen erfordert den geringsten Platzbedarf unter-/oberhalb der Riemenscheiben, Rundriemen größere Kraftübertragung da größere Berührungsfläche.
- Welche Größen gibt es ? (Querschnitt, Umfang/Länge) ? bei Rundriemen nahezu unerschöpflich (Suchbegriff O-Ring)
- Welche Materialeigenschaften sind für welchen Einsatz die besten ? NBR
- Was sollte man beim Kauf oder der Herstellung der Riemenscheiben beachten (Riemenquerschnittsform und die passende Form der Rille) ? Bei Flachriemen leicht ballig (Fassform), da zentrieren sich die Riemen. Bei Rundriemen sollte die Riemenscheibe der Form des Riemens entsprechen.
- Was mit mit der Riemenspannung ? Umfang des Riemens - 0,3mm (max. 0,5mm). Riemen werden nach Innendurchmesser x Schnurstärke bestellt.
- Was ist mit der Alterung der Riemen (Riemenspannung/Aushärtung des Materials) ? Unvermeidbar, hängt von der Materialqualität und äußeren Einflüssen (Öl) ab.
- Mit welchen konkreten Produkten konntest Du/Ihr schon positive Erfahrungen sammeln ? Verwende Massenware aus NBR.
Volker
Edit: du hast meiner Meinung nach zu viele Kugellager auf der Längswelle. Maximal an jeder Schnecke 2 und am Ende bei der Riemenscheibe. Es sollte eigentlich 2 reichen, vor der vorderen Schnecke und hinter der hinteren Schnecke. Erleichtert auch den Riemenwechsel und reduziert die Anforderungen an die Montagegenauigkeit der Kugellagersitze und Reibung innerhalb der Kugellager.
- volkerS
- ICE-Sprinter
-
Beiträge: 5.961 Registriert am: 14.10.2014

RE: Zwergendampf auf BUSCH-Gleisen
![]() #24 von
Feldbahn-Freak
, 02.03.2019 12:49
#24 von
Feldbahn-Freak
, 02.03.2019 12:49
Hallo Peter und VolkerS,
zunächst mal vielen Dank für Euere hilfreichen Informationen. Die Frühjahrsgrippe hat verhindert, dass ich mich nicht schon eher gemeldet habe. Eigentlich habe ich von Euch alles erfahren, was ich zur Einordnung dieser Antriebsart wissen sollte. Ihr beide habt das sehr schön für mich aufbereitet und ich kann mir gut vorstellen, dass der eine oder andere der "Mitlesenden" hier interessante Informationen für eigene Projekte findet.
Unbeantwortet, oder nur zwischen den Zeilen beantwortet ist die Frage nach der Plazierung des Riementriebes bei einem mehrstufigen Antrieb. Das zu übertragende Drehmoment ist in der 1. Stufe (Motorwelle Riemenscheibe) am geringsten. Ich vermute das das dann auch die günstigste Variante ist. Dafür sprechen sicherlich mehrere Gründe, wie Austauschbarkeit des O-Ringes, Geräuschentwicklung ....usw.
In meine Überlegungen habe ich mich bei der folgenden Bemerkung von Peter besonders bestätigt gefühlt:
Zitat
Hallo Joachim,
Bei Triebfahrzeugen mit montierten Schwungmassen ist der größte Nachteil der verringerte Auslauf
nach Abschaltung der Spannung verglichen mit einem Stirnzahnradgetriebe. Hierfür ist die Riemenspannung
verantwortlich.
Bei digitaler Steuerung kann man diesen Umstand aber elektronisch beheben, so daß eigentlich nur
Vorteile übrig bleiben.
Gruß, Peter
In der Aufzählung der Antriebsarten hatte ich noch eine Weitere vergessen. Der Antrieb mit 2 in Reihe geschalteten Schneck-Schneckenradkombination:
Diese Antriebsart hat auf der Habenseite geringe Geräuschentwicklung, kompakte Bauart bei gleichzeitiger hoher Untersetzung zu verbuchen.
Das Minus besteht im senkrecht stehenden Motor , der bei diesem Modell wohl Platzprobleme haben dürfte. Desweiteren steht die senkrechte Achse mit dem Schneckenrad der 1. Stufe außerhalb der Mitte. Das hat schon zu lustigen Konstruktionen geführt, die aber ihren Dienst tun!.
[quote=VolkerS]
du hast meiner Meinung nach zu viele Kugellager auf der Längswelle.
[/quote]
Ich hatte gehofft, das jemand danach fragt. Die Idee für diese Umsetzung stammt aus dem Mikromodellbau für besonders geländegängige Fahrzeuge. Eine Baugruppe mit 4 Kugellagern besteht aus der Längsachse mit Schnecke(in Fahrtrichtung), der schwenkbaren Achse mit dem Schneckenrad. Vorteil, der Zahnradeingriff ist durch diese Konstruktion exakt eingestellt, selbst wenn die schwekbare Achse einen größeren Winkel bewegt wird. Da wir aber größere Schwenkwinkel bei unserem Zwilling nicht haben werden, ist diese Version eher ein Denkspiel.
So nun wieder zum Tee und auf bessere Zeiten warten
Joachim
- Feldbahn-Freak
- InterRegioExpress (IRE)
-
Beiträge: 285 Registriert am: 03.05.2011 Ort: Thüringen Spurweite H0e, 0, 00 Stromart DC, Digital, Analog
RE: Zwergendampf auf BUSCH-Gleisen
![]() #25 von
md95129
, 05.03.2019 20:40
#25 von
md95129
, 05.03.2019 20:40
Joachim,
ich bin gespannt (pun intended), ob Du mit dem Riemenantrieb gluecklich wirst. Ich selbst war damit nie richtig zufrieden. Der Walkwiderstand selbst bei O-Ringen mit 1mm Schnurstaerke war mir einfach zu hoch. Da die Schwungmasse bei diesem Antrieb speziell bei Langsamfahrt endgueltig mehr oder weniger nutzlos wird, kannst Du sie auch gleich weglassen. Ob Du dann selbst bei 6 Schwenk-Achsen garantiert immer eine Stromaufnahme haben wirst, wird sich ebenfalls zeigen. Auf alle Faelle verfolge ich Deine Arbeit mit grossem Interesse.
Regards
Henner,
ex-Donkey Doktor der EDH Lumber
Schamlose Selbstbeweihräucherung: Eigenbauten eines alten Neulings.
US Waldbahnen/Echtdampf-Eigenbau
- md95129
- EuroCity (EC)
-
Beiträge: 1.073 Registriert am: 15.01.2017 Ort: Berlin Gleise IIm Echtdampf,H0m Steuerung DCC Eigenbau Stromart Digital
-
- Ähnliche Themen
- Antworten
- Zugriffe
- Letzter Beitrag
-
- Busch Feldbahn: Ausrundung bei Übergang von Ebene auf Steigung und umgekehrt
Erstellt im Forum Schmalspurbahn, Feldbahn von JoMa - 4
- 555
- Letzter Beitrag von
Sgns 691

03.04.2024
- Busch Feldbahn: Ausrundung bei Übergang von Ebene auf Steigung und umgekehrt
-
- Suche Fotos von Gleisen im HO-Maßstab, die mit bestimmten Referenzen geschottert wurden
Erstellt im Forum Spur H0 von amundsen - 10
- 1393
- Letzter Beitrag von
amundsen
28.05.2023
- Suche Fotos von Gleisen im HO-Maßstab, die mit bestimmten Referenzen geschottert wurden
-
- Busch H0f, Kleinstanlage
Erstellt im Forum Schmalspurbahn, Feldbahn von Oberwagenlaterne - 10
- 2964
- Letzter Beitrag von
Oberwagenlaterne
15.04.2023
- Busch H0f, Kleinstanlage
-
- Kleine H0f Busch Bahn zum herumfahren von Holz
Erstellt im Forum Meine Dioramen von Henry K. - 20
- 4301
- Letzter Beitrag von
Henry K.
16.12.2022
- Kleine H0f Busch Bahn zum herumfahren von Holz
-
- Schienenwahl für Busch Feldbahn
Erstellt im Forum Schmalspurbahn, Feldbahn von Robo02 - 2
- 1387
- Letzter Beitrag von
MoBaMirko
29.03.2022
- Schienenwahl für Busch Feldbahn
-
- Testbericht: Feldbahnen (Busch vs. Roco)
Erstellt im Forum Spur H0 von - 17
- 3810
- Letzter Beitrag von
Br103 113-7
18.02.2021
- Testbericht: Feldbahnen (Busch vs. Roco)
-
- RE: Fake News aus TrumpLand (H0f - Busch Feldbahn) FERTIG ;-)
Erstellt im Forum Meine Anlage von - 246
- 33296
- Letzter Beitrag von
monteur-joerg
13.05.2021
- RE: Fake News aus TrumpLand (H0f - Busch Feldbahn) FERTIG ;-)
-
- Busch Lokomotiven für Z-Spur Gleise - Schlechte Qualität oder mache ich etwas falsch?
Erstellt im Forum Kleine Spuren (Spur TT, N, Z) von - 7
- 3414
- Letzter Beitrag von
katzenjogi
08.06.2015
- Busch Lokomotiven für Z-Spur Gleise - Schlechte Qualität oder mache ich etwas falsch?
-
- Hilfe: Busch Feldbahn, Z-GLeise + magnetisches Problem
Erstellt im Forum Schmalspurbahn, Feldbahn von - 10
- 11797
- Letzter Beitrag von
georges
18.03.2014
- Hilfe: Busch Feldbahn, Z-GLeise + magnetisches Problem
-
- Update: Busch-Feldbahn im Test mit Video
Erstellt im Forum Schmalspurbahn, Feldbahn von - 13
- 17549
- Letzter Beitrag von
Bertyk
06.08.2013
- Update: Busch-Feldbahn im Test mit Video
