
Hallo Forianer
ich will hier mal die "Bastellösungen", die in verschiedenen Forenbeiträgen behandelt werden in einem Beitrag aufzeigen um sie vielleicht einfacher vergleichen zu können.
Die Lösung mit RaspiPi und CAN-Router (1) lief bei mir einige Zeit sehr stabil (wird als mobile Modellbahnsteuerung weiter verwendet).
Die Lösung (2b) RasPi/RocRailServer <=> BananaPi und CAN-Transceiver/Gleisbox <=> RasPi/RocNetNode ist in Verwendung, Lokomotiv- und Weichensteuerung (derzeit noch mit einem RaspberryPi = unter Test: in Zukunft auch auf dem Banana) funktioniert bereits hervorragend, jetzt geht es an die Automatik.
zum vergrößern: die Bilder anklicken
0) das ist meine derzeitige Mobasteuerung mit BananaPi: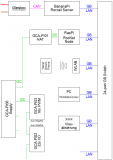
realisiert mit ISO1050 (galvanische Trennung) eingebaut in die Gleisbox (befestigt mit doppelseitigem Klebeband) und eine Buchse zur Verbindung mit dem BananaPi eingebaut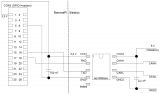

Loks steuern und Weichen stellen funktioniert schon sehr gut, jetzt geht es an die Automatik (schwitz)[/quote]
1) RaspberryPi :
a) RaspberryPi und CAN-Router:
der CAN-Bus-Verteiler und die MS2 sind nicht unbedingt erforderlich
Details in Beitrag: http://ww.stummiforum.de/viewtopic.php?f=7&t=119807
b) Rasperry PI - Can Transceiver und S88 Rückmelder xxxxxxxxx
viewtopic.php?f=7&t=137480
2) BananaPi und CAN-Transceiver
a) mit MCP2562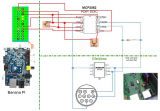
b) mit ISO1050 (galvanische Trennung zwischen BananaPi & Gleisbox - zu bevorzugen)
eingebaut in die Gleisbox (befestigt mit doppelseitigem Klebeband) und eine Buchse zur Verbindung mit dem BananaPi eingebautDetail
Details in Beitrag:
http://stummiforum.de/viewtopic.php?f=7&t=133541
http://lnxpps.de/bpi/
4) RaspberryPi mit günstigem USB2-Serial Adapter__[Danke für den Beitrag Gerd]
Details in Beitrag: http://stummiforum.de/viewtopic.php?f=7&t=125363&start=25
5) Gleisbox mit USB-Schnittstelle__[Danke für den Beitrag Gerd]
Details in Beitrag: http://stummiforum.de/viewtopic.php?f=7&t=127446
dazu fehlt nur noch ein Rechner
6) BeagleBone__[Danke für den Beitrag Michael]
Details in Beitrag: http://ww.stummiforum.de/viewtopic.php?p=1485234#p1485234
und natürlich direkt vom Urheber: http://www.mbernstein.de/modellbahn/bbb.htm
7) MäCAN-Komponenten__[Danke für den Beitrag Maxi]
Details in Beitrag: viewtopic.php?f=7&t=135905&start=75#p1525948
- Weichendecoder
- Universalmodul
- CAN-UDP-Bridge
8 CAN-Komponenten__[Danke für die Beiträge Gerd]
- CAN-Buster ==> http://stummiforum.de/viewtopic.php?f=7&t=127413#p1423463
- CAN-Verteiler ==> http://stummiforum.de/viewtopic.php?f=7&t=138823
- MFX-Booster ==> http://stummiforum.de/viewtopic.php?f=7&...649719#p1649719
9) Gleisbildstellpult__[Danke für den Beiträge Jochen]
Gleisbildstellpult: viewtopic.php?f=15&t=138691&start=50#p1609055
Gruß
Alf
PS: an dem Zustandekommen diesen Daten sind einige Forenmitglieder beteiligt, herzlichen Dank und Anerkennung an alle
PPS: wer noch andere Vorschläge bezüglich Modellbahnsteuerungen als Bastellösung hat, bitte PM, dann werde ich es gerne ergänzen
 Stummis Modellbahnforum
Stummis Modellbahnforumwww.stummiforum.de
RE: Modellbahnsteuerungen - Übersicht Bastellösungen
![]() #1 von
aftpriv
, 04.01.2016 17:06
#1 von
aftpriv
, 04.01.2016 17:06
Pickel-Bahner seit 1958 / K-Gleis + ZIMO-Decoder (MX633P22/MX645P22)
RocRail & RocNetNode jeweils auf RasPi
Email bezüglich MobaLedLib-Belange: LedLib@yahoo.com
- aftpriv
- EuroCity (EC)
-
Beiträge: 1.279 Registriert am: 03.04.2012 Ort: MKK, Hessischer Spessart Gleise K-Gleis und Selbsbau-Pickel-Gleis (DC-Gleis mit Mittelleiter ausrüsten) Spurweite H0 Steuerung Rocrail + Rocnetnode auf Raspi Stromart Digital

RE: Modellbahnsteuerungen - Übersicht Bastellösungen
![]() #2 von
aftpriv
, 03.06.2016 09:50
#2 von
aftpriv
, 03.06.2016 09:50
Hallo Forianer
ich habe den Starter-thread um Punkt 1b) ergänzt
Gruß
Alf
Pickel-Bahner seit 1958 / K-Gleis + ZIMO-Decoder (MX633P22/MX645P22)
RocRail & RocNetNode jeweils auf RasPi
Email bezüglich MobaLedLib-Belange: LedLib@yahoo.com
- aftpriv
- EuroCity (EC)
-
Beiträge: 1.279 Registriert am: 03.04.2012 Ort: MKK, Hessischer Spessart Gleise K-Gleis und Selbsbau-Pickel-Gleis (DC-Gleis mit Mittelleiter ausrüsten) Spurweite H0 Steuerung Rocrail + Rocnetnode auf Raspi Stromart Digital
RE: Modellbahnsteuerungen - Übersicht Bastellösungen
![]() #3 von
aftpriv
, 08.03.2017 20:10
#3 von
aftpriv
, 08.03.2017 20:10
Hallo Forianer
ich habe den Starter-thread um Punkt 7ff ergänzt
Gruß
Alf
Pickel-Bahner seit 1958 / K-Gleis + ZIMO-Decoder (MX633P22/MX645P22)
RocRail & RocNetNode jeweils auf RasPi
Email bezüglich MobaLedLib-Belange: LedLib@yahoo.com
- aftpriv
- EuroCity (EC)
-
Beiträge: 1.279 Registriert am: 03.04.2012 Ort: MKK, Hessischer Spessart Gleise K-Gleis und Selbsbau-Pickel-Gleis (DC-Gleis mit Mittelleiter ausrüsten) Spurweite H0 Steuerung Rocrail + Rocnetnode auf Raspi Stromart Digital
RE: Modellbahnsteuerungen - Übersicht Bastellösungen
![]() #4 von
wulf43
, 09.03.2017 17:21
#4 von
wulf43
, 09.03.2017 17:21
Hallo Stummianer,
meine „Bastellösung“ besteht aus einer selbst entwickelten Software. Der PC steuert per Programm über die serielle Schnittstelle mit der Kombination 6021/6051 alle Funktionen (s. meinen Anlagenbericht).
Bild: „Gleisbildstellpult“
Per Maus sind alle Funktionen wählbar. Der Zustand der Anlage, einschließlich der Belegung der besetzten Gleisabschnitte ist immer ersichtlich.
Gruß wulf43
Meine Anlage: Modellbahnprojekt "unendliche Geschichte"
http://stummiforum.de/viewtopic.php?f=64...513940#p1509012
- wulf43
- InterRegio (IR)
-
Beiträge: 186 Registriert am: 28.02.2013 Gleise K-GLEIS Spurweite H0 Steuerung Eigenentwicklung Software Stromart AC, Digital
RE: Modellbahnsteuerungen - Übersicht Bastellösungen
![]() #5 von
bertr2d2
, 09.05.2017 13:42
#5 von
bertr2d2
, 09.05.2017 13:42
Hallo,
hier eine Zusammenfassung der CAN-Adapter, die ich aufgebaut habe und eine persönliche Einschätzung:
Blue Pill (STM32 Board für < 2 Euro) + Transceiver (zusammen ca. 10 Euro)
+ günstigste Lösung
+ Einbau in die Gleisbox möglich
- STM32/Linux Erfahrung notwendig
- Rechner notwendig
Microchip PIC18F25k80 (ca. 10 - 15 Euro)
+ preisgünstig, durch Sampling sogar noch günstiger
+ Einbau in Gleisbox möglich
+ Teilplatine verfügbar
- Linux Erfahrung notwendig
- Rechner notwendig
CANBuster (ca. 25 Euro)
+ Rückmelder
+ integriertes S88 Interface
+ USB Anschluss über preiswerten USB-zu-seriell Wandler
- relativ aufwendiger Aufbau
- Rechner notwendig
Router TP-Link WR841 mit CAN-Interface (35 Euro)
+ preisgünstig
+ relativ kompakt
+ Platine verfügbar
+ CS2 Emulation (inclusive Netzwerk/WiFI)
+ mit Flash Speichererweiterung Rocrail-Server integriebar
- Linux Erfahrung notwendig
- knapper Speicher
- Router ist mittlerweile schwer beschaffbar (nur V8.x möglich)
RPi + Aufsteckplatine (ca. 60 Euro)
+ performant
+ Platine verfügbar
+ CS2 Emulation (inclusive Netzwerk)
+ Server integrierbar (z.B. Rocrail)
+ für mittelgroße Anlagen geeignet
- Linux Erfahrung notwendig
BPi + Aufsteckplatine (ca. 60 Euro)
+ performant
+ vorgefertigte Images
+ Platine verfügbar
+ CS2 Emulation (inclusive Netzwerk)
+ Server integriert (z.B. Rocrail)
+ S88 integriert
+ weitere Schnittstellen verfügbar (I2C, UART)
+ für mittelgroße Anlagen geeignet
- Basis Linux Erfahrung notwendig
BBB + Transceiver (ca. 70 Euro)
+ performant (beste CAN Lösung)
+ vorgefertigtes Image (MRSystem von M.Bernstein)
+ CS2 Emulation (incl. Netzwerk)
+ Server integriert (z.B. Rocrail)
+ weitere Schnittstellen möglich (u.a. S88, I2C, UART, RS485)
+ für mittelgroße Anlagen geeignet
- Linux Erfahrung notwendig
SRSEII (ca. 50 - 100 Euro)
+ sehr kompakt / Einbau in die Gleisbox
+ vorgefertigtes Image
+ CS2 Emulation (inclusive Netzwerk/WiFi)
+ Rocrail-Server integriert
+ S88 (5V/12V wählbar) integriert
+ weitere Schnittstellen verfügbar (u.a. I2C, UART)
+ vorgefertigte Platinen + Boxen erhältlich
- viel Löterfahrung nötig (entfällt bei vorgefertigter Platine)
- Einbau relativ aufwendig (entfällt bei Kauf einer fertigen Box)
Gruß
Gerd
Smallest Rocrail Server Ever II ist jetzt Smallest Railroad Server Ever II 
SRSEII -> SRSEII (Raider heisst jetzt Twix, sonst ändert sich nix  )
)
- bertr2d2
- CityNightLine (CNL)
-
Beiträge: 1.542 Registriert am: 09.10.2012 Spurweite H0 Stromart Digital
RE: Modellbahnsteuerungen - Übersicht Bastellösungen
Hi,
ich hätte da auch noch eine Halb-Selbstbaulösung, schön gemixt, hier mal Rahmendaten:
(+) 2x Raspi (B2 und B3) (zwei 15" Bildschirme dazu)
(+) Rocrail auf einem Raspi
(+) CS3 als Netzwerk-CAN für Rocrail und Programmierstation für Loks
(+) CC-Schnitte als Gateway USB <-> CAN
(+) Weichensteuerung über CAN (in Migration)
- Schaltungen im Selbstbau, lösen gerade die "alten" MAD 4 von IEK ab:
- Eine Serie mit Impulsschaltung (old fashionend), und
- eine Serie für Servoantriebe
[list]
[/list]
(+) Rückmeldung per CAN
- einige Selbstbau-Module auf Atmel-Basis
- einige CdB-Module (Rückmeldung)
(+) Software
- Setzt auf einen Rocrail-Server auf (via XML-Scripting)
- In Java und JavaFX programmiert
- Läuft auf beiden Raspis mit JDK 8
- Implementiert:
[list] - Stellpult "virtuell", das über (bei mir) Touchscreen bedienbar ist (Weichen, Signale, Blockrückmeldung, Virtuelles Schaltpult)
- Hardwaresteuerungsmöglichkeit von Weichen (Zuordnung von Tastern zu einer Adresse)
- Steuerung von zwei je auswählbare Loks über Bildschirm mit Hardware-Regler (angebunden über eine Arduino-Lösung)
[*]Bereits im Code vorbereitet:
- Standalone-Betrieb ohne Rocrail, direkte CAN-Steuerung
- Noch nicht ausprogrammiert: SRCP-Client. (fraglich, ob ich das weiterverfolge)
- Technisch ist es grundsätzlich möglich, andere Protokolle zu bedienen, bsp. ZCAN
[/list]
Bevor einer nach dem "Warum" fragt: Meinen Kiddies war die MS2 etc. zu kompliziert. Und ich hatte keine Lust mehr, unser Hardware-Stellpult bei jeder neuen Weiche umzulöten ...

Tja, und dann wurde das Projekt ein Selbstläufer ...

Falls Interesse besteht, kann ich über die Software mit Screenshots genauer berichten.
Die Hardware verwendet im Prinzip das Standard-Design mit MCP2515 und ISO1050 (den Chip immer und grundsätzlich), sowie Atmega328 (bereits vor MäCan
 ), die Software setzt bisher auf eine von mir erweiterte Version von Railuino auf ... wobei ich die Libs vermutlich austauschen werde gegen die, welche MäCan nutzt. Das auch, weil ich hier ein paar hübsche Atmega64M1 liegen habe, die den CAN-Controller schon eingebaut haben (schwer zu bekommen, die Dinger) und die andere Basis-Libs brauchen. Das Platinen-Layout ist in der Mache ...
), die Software setzt bisher auf eine von mir erweiterte Version von Railuino auf ... wobei ich die Libs vermutlich austauschen werde gegen die, welche MäCan nutzt. Das auch, weil ich hier ein paar hübsche Atmega64M1 liegen habe, die den CAN-Controller schon eingebaut haben (schwer zu bekommen, die Dinger) und die andere Basis-Libs brauchen. Das Platinen-Layout ist in der Mache ...Viele Grüße,
Martin
--
No RISC no fun.
- mra
- S-Bahn (S)
-
Beiträge: 15 Registriert am: 07.01.2016 Ort: Rosenheim Spurweite H0 Steuerung MM/DCC/MFX CAN Stromart AC, Digital
-
- Ähnliche Themen
- Antworten
- Zugriffe
- Letzter Beitrag
-
- Modellbahnsteuerung ALAN
Erstellt im Forum Kleine Spuren (Spur TT, N, Z) von KatMobaN - 265
- 23156
- Letzter Beitrag von
graetz

22.04.2024 09:00
- Modellbahnsteuerung ALAN
-
- Moderne Hardware zur Modellbahnsteuerung mit PC
Erstellt im Forum Software und Hardware von E-Bahner - 4
- 1920
- Letzter Beitrag von
vikr
07.06.2022
- Moderne Hardware zur Modellbahnsteuerung mit PC
-
- Modellbahnsteuerung von voll automatisch auf teilautomatisch im Spielbetrieb umstellen möglich?
Erstellt im Forum Software und Hardware von - 5
- 1065
- Letzter Beitrag von
Pirat-Kapitan
20.03.2021
- Modellbahnsteuerung von voll automatisch auf teilautomatisch im Spielbetrieb umstellen möglich?
-
- Preiswerte Modellbahnsteuerung mit Banana Pi und Gleisbox
Erstellt im Forum Software und Hardware von - 327
- 62964
- Letzter Beitrag von
Rainer Müller
12.04.2024
- Preiswerte Modellbahnsteuerung mit Banana Pi und Gleisbox
-
- Meine Modellbahnsteuerung - SpDrS60 Stellwerk / Selbstblock / Zentralblock
Erstellt im Forum Elektrik und Elektronik von - 4
- 3610
- Letzter Beitrag von
PATs in 1zu87
01.07.2018
- Meine Modellbahnsteuerung - SpDrS60 Stellwerk / Selbstblock / Zentralblock
-
- ComputerClub2 - "Digitale Modellbahnsteuerung mit einem PC"
Erstellt im Forum Digital von - 3
- 1657
- Letzter Beitrag von
nakott
16.03.2015
- ComputerClub2 - "Digitale Modellbahnsteuerung mit einem PC"
-
- Mini Rocrail Server / OpenWRT und Modellbahnsteuerung
Erstellt im Forum Software und Hardware von - 21
- 12496
- Letzter Beitrag von
Wechselstromer
09.02.2013
- Mini Rocrail Server / OpenWRT und Modellbahnsteuerung
-
- ProfiRail die Modellbahnsteuerung von Elcotex Teil I
Erstellt im Forum Digital von - 16
- 2079
- Letzter Beitrag von
Rick
09.02.2009
- ProfiRail die Modellbahnsteuerung von Elcotex Teil I
