
Guten Abend Hermann,
moderne Dekoder sind ab Werk nicht auf Regelungsausmaß = 100% eingestellt. Ferner: ein paar Modelle mit Dekodern habe ich via Interpolation ausrechnen lassen; da ist keine Regelung dabei (ich habe noch keinen Algorithmus zur Berechnung ab initio). Modelle mit LRA haben aufgrund der Dekoderkonzeption niedrigere Regelungsausmaße als mit fremderregten Motoren, für die der Dekoder konzipiert ist.
mit freundlichen Grüßen,
Stephan-Alexander Heyn
 Stummis Modellbahnforum
Stummis Modellbahnforumwww.stummiforum.de
RE: Motorsteuerung bei DCC-Decodern
![]() #401 von
SAH
, 13.06.2017 19:35
#401 von
SAH
, 13.06.2017 19:35
Stephan-Alexander Heyn
www.sheyn.de/Modellbahn/index.php
RE: Motorsteuerung bei DCC-Decodern
![]() #402 von
CDC-User
, 14.06.2017 10:21
#402 von
CDC-User
, 14.06.2017 10:21
Hallo Stepan-Alexander,
Zitat
da ist keine Regelung dabei (ich habe noch keinen Algorithmus zur Berechnung ab initio).
Ich kann mir im Moment auch keine Möglichkeit vorstellen, bei der das Regelungsausmaß eines Decoders nur durch dessen Spezifikation (und evtl. die des Motors) ermittelt werden kann. Man kann vielleicht versuchen (so wie ich das tue) die Regelung ohne Motor zu analysierren. Dabei muss aber auch der Strom, Spannung und Zeit gemessen werden.
Mit den gemessenen Daten kann man dann bei Motoren (von denen man die techn. Daten kennt, z.B. Faulhaber) den theor. Verlauf der Drehzahl ermitteln. Allerdings ist das dann nicht sehr repräsentativ, da Dinge wie der Drehmomentripple nicht betrachtet werden können.
Zitat
moderne Dekoder sind ab Werk nicht auf Regelungsausmaß = 100% eingestellt.
Ja, das ist verständlich, da nicht gerade realistisch.
Ich meine das die Decoder aber auch keine 100% Regelung können, auch wenn man das einstellt.
(also sie können nicht bei jeder Geschwindigkeit zu 100% regeln)
Nachdem ich mich bei den DCC-Decodern gerade mit der Regelungsreferenz beschäftige, hatte ich dich nach deinen Ergebnissen gefragt, weil ich mir folgendes überlegt habe:
Wenn das Byte der Regelungsreferenz angibt, welche Spannung bei Vmax vom Motor kommt
(Zitat Zimo BDA "CV #57: Absolute Motorsteuerungs-Spannung in Zehntel-Volt, die bei voller Fahrt (höchste Fahrregler-Stellung) am Motor anliegen soll.
BEISPIEL: Fremdsystem mit Schienenspannug im Leerlauf 22V, bei voller Belastung aber nur 16 V: zweckmäßige Einstellung daher CV #57 = 140 ... 150" (also zw. 14V und 15V))
, dann ist doch folgendes Szenario denkbar.
Annahme:(Teil 1)
* U_Gleis stabilisiert und geglättet bei 12V => CV57 = 110
* Motor: FH 1717012SR mit k_E = 0.829 mV*min
* linearer Fahrstufenverlauf (der Einfachheit halber)
Nach der BDA muss das doch für den 10Bit ADC bedeuten, dass 1023 (=Vollausschlag ADC) der in CV57 eingestellten Spannung (hier 11V) entspricht. Dann bekommt man 11000 mV / 1024 = ~11 mV/Bit-Wert
Soll-Drehzahl z.B. 6000 RPM:
Motor-Gegen-EMK bei 6000 RPM = 4.97V =~5V, die es auch unter Last von der Regelung zu halten gilt.
Soll-Bit-Wert des ADC bei 6000 RPM = 463
Fragen:
Wie weit darf/kann die Drehzahl abnehemen, ohne dass die Regelung zu regeln beginnt, weil diese noch kein Soll-Ist-Unterschied erkennt?
-> Der Soll-Ist-Unterschied ist gleich "1", wenn der ADC als Ist-Bit-Wert 462 misst.
Was bedeutet dies für die Drehzahl?
-> 1bit entsprechen 11mV, also gilt 11mV / k_E = 12,96 RPM =~13 RPM
Das bedeutet, dass die Drehzahl unter Belastung um 13RPM einbrechen muss/darf bis die Regelung davon überhaupt etwas mitbekommt.
Für geregeltes Langsamfahren total unbrauchbar, da dort üblicherweise Drehzahlen zw. 1 und ~12 RPM von nöten sind.
=>schlechte Langsamfahreigenschaften
-------------------------
Annahme:(Teil 2)
* U_Gleis stabilisiert und geglättet bei 12V => CV57 = 40
Dann bekommt man 4000 mV / 1024 bit = ~4 mV/Bit-Wert
Was bedeutet das jetzt für den Drehzahlschwankungsbereich?
-> 1bit entsprechen 4mV, also gilt 4mV / k_E = 4,71 RPM =~5,5 RPM
Das bedeutet, dass die Drehzahl unter Belastung um 5,5 RPM einbrechen muss/darf bis die Regelung davon überhaupt etwas mitbekommt.
Eine Regelung auf 2, 3, 4 RPM ist damit immer noch nicht möglich, obgleich es für das Langsamfahren schon deutlich besser ist als im oberen Fall.
Was passiert jetzt aber, wenn wir eine hohe Geschwindigkeit regeln wollen?
Vollgas bei 12V ~6000 RPM; nehmen wir mal 5500 RPM, was dann einer hohen Fahrstufe entspricht.
Soll-Drehzahl 5500 RPM:
Motor-Gegen-EMK bei 5500 RPM = 4.56V , die es auch unter Last von der Regelung zu halten gilt.
Soll-Bit-Wert des ADC bei 5500 RPM = 1140
Der maximale Bit-Wert des 10bit ADC ist aber nur 1024. => 1140-1024 = 116; Damit misst der ADC im oberen Drehzahlbereich praktisch ständig Vollausschlag.
Frage:
Wie weit muss die EMK-Spannung des Motors absinken, damit die Regelung einen unterschied messen kann?
-> 116 Bit-Werte "Überschuss" entsprechen bei "4 mV/Bit-Wert" 4*116 mV = 464 mV; muss die EMK des Motors absinken.
Wie weit muss/darf dann die Drehzahl abnehmen, bis die Regelung davon überhaupt etwas merkt?
-> 464 mV / k_E = 559.71 RPM =~ 556 RPM
Die Drehzahl muss also von 5500 RPM erst auf unter 5000 RPM absinken, damit die Regelung zu regeln beginnt.
Das bedeutet für diesen konkreten Fall des der Decoder max. nur ~91% ausregeln kann. (alle anderen Beeinträchtigungen vernachlässigt)
Die Regelung ist also bei höheren Geschwindigleiten nicht in der lage diese annähernd zu halten, da sich der ADC bei dieser Einstellung viel zu früh in seinem Grenzbereich befindet. Logischerweise kann man so auch bei Weitem keine annähernd 100% Regelungsausmaß erreichen, selbst wenn das Regelungsausmaß auf 100% gestellt ist.
Was meint ihr dazu?
Wenn meine Überlegungen richtig sind, würde das den D&H aber auch den C-Digital Decoder von Martin, was die Motorregelung angeht, besonders herausheben. Beide Decoder benötigen für die Regelung keine einstellbare Regelungsreferenz.
Ich hatte doch in dem Faden "wie langsam ist langsam" mal das Problem, dass ich mit meinem Zimo-Decoder den HLA nicht auf die 12 RPM brachte (so wie Markus alias Marky). Dafür musste ich dann die Regelungsreferenz deutlich herabsetzten (von ~140 auf ~30). Dann bekommt man zwar ein schönes Langsamfahrverhalten, bei höheren Drehzahlen greift die Regelung jedoch dann erst bei deutlichem Drehzahleinbruch.
Derartiges Verhalten ist weder beim D&H noch beim "C"-Decoder feststellbar.
Mit freundlichem Gruß,
Hermann
- CDC-User
- InterRegioExpress (IRE)
-
Beiträge: 294 Registriert am: 24.02.2017

RE: Motorsteuerung bei DCC-Decodern
![]() #403 von
SAH
, 15.06.2017 17:51
#403 von
SAH
, 15.06.2017 17:51
Guten Tag Hermann,
ZitatZitat
da ist keine Regelung dabei (ich habe noch keinen Algorithmus zur Berechnung ab initio).
Ich kann mir im Moment auch keine Möglichkeit vorstellen, bei der das Regelungsausmaß eines Decoders nur durch dessen Spezifikation (und evtl. die des Motors) ermittelt werden kann. Man kann vielleicht versuchen (so wie ich das tue) die Regelung ohne Motor zu analysierren. Dabei muss aber auch der Strom, Spannung und Zeit gemessen werden.
Mit den gemessenen Daten kann man dann bei Motoren (von denen man die techn. Daten kennt, z.B. Faulhaber) den theor. Verlauf der Drehzahl ermitteln. Allerdings ist das dann nicht sehr repräsentativ, da Dinge wie der Drehmomentripple nicht betrachtet werden können.
Speziell im Digitalbetrieb habe ich eine Möglichkeit, da ich ausführliche Tests auch mit angehängten Zügen durchführe:
Im Rahmen meiner Testtabellen werden die Modelle bei FS 7/14 (entspricht mittlerer Trafoeinstellung analog (=12V  ))
))
getestet gemäß meiner Testbedingungen. Damit habe ich mindestens 3 Messpunkte:
U/I/t solo, U/t mit Zug1 (=64g Zugmasse) und U/I/mzugmax. Bei zugstarken Modellen kommt noch U/t mit Zug2 (126g) hinzu.
Die Interpolation ist die Verbindungsgerade UITsolo - Utmmax. Um die Zwischenpunkte einzubeziehen, benötige ich noch den Zusammenhang zwischen Schlupf, Last und Maximallast. Darüber schweigen sich meine Quellen leider aus.
ZitatZitat
moderne Dekoder sind ab Werk nicht auf Regelungsausmaß = 100% eingestellt.
Ja, das ist verständlich, da nicht gerade realistisch.
Ich meine das die Decoder aber auch keine 100% Regelung können, auch wenn man das einstellt.
(also sie können nicht bei jeder Geschwindigkeit zu 100% regeln)
Das habe ich auch schon vor Jahr und Tag geschrieben, und prompt wurde ich geflamt. Die Dekoder *können* das nocht, vor allem weil Einflüsse außerhalb des Regelkreises (z.B. Schlupf) eine Rolle spielen. In der Fortführung meiner Dekodertests werde ich auf die vonb mir erreichten Werte eingehen.
Zitat
Nachdem ich mich bei den DCC-Decodern gerade mit der Regelungsreferenz beschäftige, hatte ich dich nach deinen Ergebnissen gefragt, weil ich mir folgendes überlegt habe:
Wenn das Byte der Regelungsreferenz angibt, welche Spannung bei Vmax vom Motor kommt
(Zitat Zimo BDA "CV #57: Absolute Motorsteuerungs-Spannung in Zehntel-Volt, die bei voller Fahrt (höchste Fahrregler-Stellung) am Motor anliegen soll.
BEISPIEL: Fremdsystem mit Schienenspannug im Leerlauf 22V, bei voller Belastung aber nur 16 V: zweckmäßige Einstellung daher CV #57 = 140 ... 150" (also zw. 14V und 15V))
, dann ist doch folgendes Szenario denkbar.
Ich gehe von einer Digitalumgebung aus. 6V Spannungsdifferenz zwischen Leerlauf und Nennleistung? Ist das nicht ein bisschen viel? 16V sind ok!
Zitat
Annahme:(Teil 1)
* U_Gleis stabilisiert und geglättet bei 12V => CV57 = 110
* Motor: FH 1717012SR mit k_E = 0.829 mV*min
* linearer Fahrstufenverlauf (der Einfachheit halber)
Nach der BDA muss das doch für den 10Bit ADC bedeuten, dass 1023 (=Vollausschlag ADC) der in CV57 eingestellten Spannung (hier 11V) entspricht. Dann bekommt man 11000 mV / 1024 = ~11 mV/Bit-Wert
Soll-Drehzahl z.B. 6000 RPM:
Motor-Gegen-EMK bei 6000 RPM = 4.97V =~5V, die es auch unter Last von der Regelung zu halten gilt.
Soll-Bit-Wert des ADC bei 6000 RPM = 463
Fragen:
Wie weit darf/kann die Drehzahl abnehemen, ohne dass die Regelung zu regeln beginnt, weil diese noch kein Soll-Ist-Unterschied erkennt?
-> Der Soll-Ist-Unterschied ist gleich "1", wenn der ADC als Ist-Bit-Wert 462 misst.
Was bedeutet dies für die Drehzahl?
-> 1bit entsprechen 11mV, also gilt 11mV / k_E = 12,96 RPM =~13 RPM
Das bedeutet, dass die Drehzahl unter Belastung um 13RPM einbrechen muss/darf bis die Regelung davon überhaupt etwas mitbekommt.
Für geregeltes Langsamfahren total unbrauchbar, da dort üblicherweise Drehzahlen zw. 1 und ~12 RPM von nöten sind.
=>schlechte Langsamfahreigenschaften
-------------------------
Annahme:(Teil 2)
* U_Gleis stabilisiert und geglättet bei 12V => CV57 = 40
Dann bekommt man 4000 mV / 1024 bit = ~4 mV/Bit-Wert
Was bedeutet das jetzt für den Drehzahlschwankungsbereich?
-> 1bit entsprechen 4mV, also gilt 4mV / k_E = 4,71 RPM =~5,5 RPM
Das bedeutet, dass die Drehzahl unter Belastung um 5,5 RPM einbrechen muss/darf bis die Regelung davon überhaupt etwas mitbekommt.
Eine Regelung auf 2, 3, 4 RPM ist damit immer noch nicht möglich, obgleich es für das Langsamfahren schon deutlich besser ist als im oberen Fall.
Was passiert jetzt aber, wenn wir eine hohe Geschwindigkeit regeln wollen?
Vollgas bei 12V ~6000 RPM; nehmen wir mal 5500 RPM, was dann einer hohen Fahrstufe entspricht.
Soll-Drehzahl 5500 RPM:
Motor-Gegen-EMK bei 5500 RPM = 4.56V , die es auch unter Last von der Regelung zu halten gilt.
Soll-Bit-Wert des ADC bei 5500 RPM = 1140
Der maximale Bit-Wert des 10bit ADC ist aber nur 1024. => 1140-1024 = 116; Damit misst der ADC im oberen Drehzahlbereich praktisch ständig Vollausschlag.
Frage:
Wie weit muss die EMK-Spannung des Motors absinken, damit die Regelung einen unterschied messen kann?
-> 116 Bit-Werte "Überschuss" entsprechen bei "4 mV/Bit-Wert" 4*116 mV = 464 mV; muss die EMK des Motors absinken.
Wie weit muss/darf dann die Drehzahl abnehmen, bis die Regelung davon überhaupt etwas merkt?
-> 464 mV / k_E = 559.71 RPM =~ 556 RPM
Die Drehzahl muss also von 5500 RPM erst auf unter 5000 RPM absinken, damit die Regelung zu regeln beginnt.
Das bedeutet für diesen konkreten Fall des der Decoder max. nur ~91% ausregeln kann. (alle anderen Beeinträchtigungen vernachlässigt)
Die Regelung ist also bei höheren Geschwindigleiten nicht in der lage diese annähernd zu halten, da sich der ADC bei dieser Einstellung viel zu früh in seinem Grenzbereich befindet. Logischerweise kann man so auch bei Weitem keine annähernd 100% Regelungsausmaß erreichen, selbst wenn das Regelungsausmaß auf 100% gestellt ist.
Was meint ihr dazu?
Wenn meine Überlegungen richtig sind, würde das den D&H aber auch den C-Digital Decoder von Martin, was die Motorregelung angeht, besonders herausheben. Beide Decoder benötigen für die Regelung keine einstellbare Regelungsreferenz.
Ich hatte doch in dem Faden "wie langsam ist langsam" mal das Problem, dass ich mit meinem Zimo-Decoder den HLA nicht auf die 12 RPM brachte (so wie Markus alias Marky). Dafür musste ich dann die Regelungsreferenz deutlich herabsetzten (von ~140 auf ~30). Dann bekommt man zwar ein schönes Langsamfahrverhalten, bei höheren Drehzahlen greift die Regelung jedoch dann erst bei deutlichem Drehzahleinbruch.
Derartiges Verhalten ist weder beim D&H noch beim "C"-Decoder feststellbar.
Sicherheitshalber sollten 2V Differenz via CV57 eingestellt werden. Daher entweder U_Schiene=14V, CV57=120 oder U_Schiene=12V, CV57=100.
Nun zur Regelreferenz:
diese gilt für die maximale Spannung bzw Geschwindigkeit. Mit Deinen Angaben bezieht sich (zumindest bei Zimo) der Mindestbetrag für ein Ansprechen der Regelung stets auf diesen Wert. Im Langsamfahrbereich eine Katastrophe, im o.g. Zielbereich (6000rpm) nicht bemerkbar: die durchschnittliche Geschwindigkeitskonstanz liegt bei ca. 1% (vgl. Klassengrenzen und Erfahrungswerte. Nur bei stabilisierter Gleisspannung kommt man in den Promillebereich. Spitzenreiter ist bei mir derzeit ein Sinus3-Modell (39563) mit einer Geschwindigkeitskonstanz von 0,06%. Zimo läuft in dieser Hinsicht unter "ferner liefen".  flaster:
flaster:
Damit komme ich auf eine frühere Spekulation meinerseits zurück: es wäre vor diesem Hintergrund evtl. sinnvoll, über einen fahrstufenangepassten ADC nachzudenken. +/-11 rpm bei 6000 rpm fällt (fast) Keinem auf!
Weiter zum Regelungsausmaß:
als avsolutes Maß, wie von Dir weiter oben angegeben sieht es einfacher aus, als es ist. Es fehlt ein Bezug zum Motor ohne Regelung, sozusagen als "Feintuning" der Skala: =% Regelung entspricht somit einem willkürlichen Abfall der Drehzahl. Dabei ist die Minderung der Drehzahl als Funktion der Last typischerweise vom Motor und der Spannung abhängig. Folglich: Regelungsausmaß = 0% bei Drehzahlverlust im Umfang des ungeregelten Motors, Regelungsausma0 = 100% bei keinem Drehzahlverlust. Die folgende "Schnellauswertung" wird in den o.g. Dekodervergleich zur Sprache kommen:
Beispiel Piko E44 mit Uhlenbrockdekoder 76400
v_solo 100 (12,56V)=121,96 km/h; 150 (15,03V) = 145,98 km/h (AC, "stabilisiert")
V100L FS7/14 = 102,49 km/h; V150L = 140,71 km/h (MMS, Tams stabilisiert bei 20V)
V100L FS7/14 = 102,49 km/h; V150L = 139,89 km/h (DCC, Tams stabilisiert bei 20V)
V100 Zug1: 93,29 km/h; V150Z1: 105,29km/h (AC, "stabilisiert", Annahme: ohne Regelung)
V100Z1: 81,96 km/h; V150Z1: 110km/h (MMS)
V100Z1: 82,79 km/h; V150Z1: 109,82km/h (MMS)
Regelungsausmaß gem. Regelung mit Reihenschlussmotoren -- eine Verbesserung
(nrel mit - nrel ohne)/(1-n rel ohne)
nrel ohne 100 = v100Z1/V100L = 0,765; nrel ohne 150 = 0,721
nrel mit (MMS) 100 = 0,800; nrel mit 150 = 0,781
nrel mit (DCC) 100 = 0,808; nrel mit 150 = 0,785
RA100 (MMS) = 14,9%  RA150 = 21,4%
RA150 = 21,4%
RA100 (DCC) = 18,3% RA150 = 22,9%
Ergo: analog mit Regelung; zu erwarten wären RA >85%
Ich such noch einen passenden Vergleich raus.
mit freundlichen Grüßen,
Stephan-Alexander Heyn
Stephan-Alexander Heyn
www.sheyn.de/Modellbahn/index.php
RE: Motorsteuerung bei DCC-Decodern
![]() #404 von
CDC-User
, 15.06.2017 22:22
#404 von
CDC-User
, 15.06.2017 22:22
Hallo Stephan-Alexander,
Zitat
Speziell im Digitalbetrieb habe ich eine Möglichkeit, da ich ausführliche Tests auch mit angehängten Zügen durchführe:
Im Rahmen meiner Testtabellen werden die Modelle bei FS 7/14 (entspricht mittlerer Trafoeinstellung analog (=12V
getestet gemäß meiner Testbedingungen. Damit habe ich mindestens 3 Messpunkte:
U/I/t solo, U/t mit Zug1 (=64g Zugmasse) und U/I/mzugmax. Bei zugstarken Modellen kommt noch U/t mit Zug2 (126g) hinzu.
Die Interpolation ist die Verbindungsgerade UITsolo - Utmmax. Um die Zwischenpunkte einzubeziehen, benötige ich noch den Zusammenhang zwischen Schlupf, Last und Maximallast. Darüber schweigen sich meine Quellen leider aus.
Bei deiner Methode, die ich als gut bezeichnen würde, bist du aber auch auf Messungen im Betrieb angewiesen. Folglich hast du auch mit den Fehlerquellen die dabei entstehen können zu tun. Als eine Berechnung "ab initio" würde ich das jedoch nicht bezeichnen.
Zitat
Ja, das ist verständlich, da nicht gerade realistisch.
Ich meine das die Decoder aber auch keine 100% Regelung können, auch wenn man das einstellt.
(also sie können nicht bei jeder Geschwindigkeit zu 100% regeln)Zitat
Das habe ich auch schon vor Jahr und Tag geschrieben, und prompt wurde ich geflamt. Die Dekoder *können* das nocht, vor allem weil Einflüsse außerhalb des Regelkreises (z.B. Schlupf) eine Rolle spielen. In der Fortführung meiner Dekodertests werde ich auf die vonb mir erreichten Werte eingehen.
Schön, dass wir auch hier die gleiche Enschätzung teilen.
ZitatZitat
Nachdem ich mich bei den DCC-Decodern gerade mit der Regelungsreferenz beschäftige, hatte ich dich nach deinen Ergebnissen gefragt, weil ich mir folgendes überlegt habe:
Wenn das Byte der Regelungsreferenz angibt, welche Spannung bei Vmax vom Motor kommt
(Zitat Zimo BDA "CV #57: Absolute Motorsteuerungs-Spannung in Zehntel-Volt, die bei voller Fahrt (höchste Fahrregler-Stellung) am Motor anliegen soll.
BEISPIEL: Fremdsystem mit Schienenspannug im Leerlauf 22V, bei voller Belastung aber nur 16 V: zweckmäßige Einstellung daher CV #57 = 140 ... 150" (also zw. 14V und 15V))
, dann ist doch folgendes Szenario denkbar.
Ich gehe von einer Digitalumgebung aus. 6V Spannungsdifferenz zwischen Leerlauf und Nennleistung? Ist das nicht ein bisschen viel? 16V sind ok!
Völlig d'accord, ich habe mich nicht auf die üblichen 18V Digitalspannung bezogen. Ich habe einfach nur eine mehr oder weniger beliebige DC Spannung genommen, weil es, für das was ich mit der Rechnung/Überlegung zeigen wollte, eigentlich nicht so relevant ist. Die Werte verschieben sich halt dann, das Problem bleibt jedoch das gleiche. 
Zitat
Sicherheitshalber sollten 2V Differenz via CV57 eingestellt werden. Daher entweder U_Schiene=14V, CV57=120 oder U_Schiene=12V, CV57=100.
Ja, so empfiehlt es auch die BDA von Zimo.
Zitat
Nun zur Regelreferenz:
diese gilt für die maximale Spannung bzw Geschwindigkeit. Mit Deinen Angaben bezieht sich (zumindest bei Zimo) der Mindestbetrag für ein Ansprechen der Regelung stets auf diesen Wert. Im Langsamfahrbereich eine Katastrophe, im o.g. Zielbereich (6000rpm) nicht bemerkbar: die durchschnittliche Geschwindigkeitskonstanz liegt bei ca. 1% (vgl. Klassengrenzen und Erfahrungswerte. Nur bei stabilisierter Gleisspannung kommt man in den Promillebereich. Spitzenreiter ist bei mir derzeit ein Sinus3-Modell (39563) mit einer Geschwindigkeitskonstanz von 0,06%. Zimo läuft in dieser Hinsicht unter "ferner liefen".
Das ist es was ich zeigen wollte, bzw was ich mir überlegt habe. Wenn man die Referenz so einstellt, dann bekommt man ein schlechtes Langsamfahrverhalten und wenn man es anders einstellt, dann ist die Regelung in den mittleren und oberen Fahrstufen zu unempfindlich. 
Zitat
Damit komme ich auf eine frühere Spekulation meinerseits zurück: es wäre vor diesem Hintergrund evtl. sinnvoll, über einen fahrstufenangepassten ADC nachzudenken. +/-11 rpm bei 6000 rpm fällt (fast) Keinem auf!
Finde ich auch. Wie erwähnt, ist das beim C-Digital Decoder der Fall. Bei dem D&H ist das noch anders gelöst.
Beide kennen diese Probleme praktisch nicht.
Zitat
Weiter zum Regelungsausmaß:
als avsolutes Maß, wie von Dir weiter oben angegeben sieht es einfacher aus, als es ist.
Dabei wollte ich mit meiner Rechnung nur darauf hinaus, dass alleine, wenn man das von mir angesprochene betrachtet, eine 100% Regelung nicht möglich sein kann. Ich habe weder die 100% genau spezifiziert, noch andere Dinge wie den Drehmomenteinbruch etc. mit einbezogen.
Dafür hast du diese genauen und korrekten Untersuchungen ja schon durchgeführt , (dann muss ich das nicht mehr machen...)
Zitat
Regelungsausmaß gem. Regelung mit Reihenschlussmotoren -- eine Verbesserung
(nrel mit - nrel ohne)/(1-n rel ohne)
nrel ohne 100 = v100Z1/V100L = 0,765; nrel ohne 150 = 0,721
nrel mit (MMS) 100 = 0,800; nrel mit 150 = 0,781
nrel mit (DCC) 100 = 0,808; nrel mit 150 = 0,785
RA100 (MMS) = 14,9%
RA100 (DCC) = 18,3%
Ergo: analog mit Regelung; zu erwarten wären RA >85%
Ich such noch einen passenden Vergleich raus.
Das scheint doch das zu zeigen, wovon ich gesprochen habe.
Für mich wäre es noch interessant zu sehen, wie sich das Regelungsausmaß im Verlauf der Fahrstufen ändert.
Ich habe bei einigen Decodern im Langsamfahrbereich ein übersteuern festgestellt.
Soll heißen: FS 1 geregelt ohne Last (nur Lok selbst auf gerader 3m Strecke) durchschnittlich 0,76 km/h und mit angehängter Last (67,77g) durchschnittliche 1,1 km/h.
Auch mit meiner "Simulation" habe ich unter Last ein Übersteuern festgestellt.
Ich hoffe ich finde jetzt auch langsam mal die Zeit, deine ganzen Tests etc. genau zu studieren. Du hast da ja sehr viel Aufwand betrieben. 
Mit freundlichem Gruß,
Hermann
- CDC-User
- InterRegioExpress (IRE)
-
Beiträge: 294 Registriert am: 24.02.2017
RE: Motorsteuerung bei DCC-Decodern
![]() #405 von
CDC-User
, 16.06.2017 17:16
#405 von
CDC-User
, 16.06.2017 17:16
Hallo Henner,
Zitat von md95129 im Beitrag Motorsteuerung bei DCC-Decodern
voellig Deiner Meinung. Ich bin zur Zeit noch ein wenig ausgeschossen, was das Lesen/Schreiben betrifft, deswegen fast keine Posts. Alle Literaturstellen, die ich bisher in die Haende bekommen habe, behandeln das System DC-Motor/PWM, als ob der Motor eine gemittelte Spannung sieht. Offenbar hat sich niemand die Muehe gemacht, das Problem richtig zu analysieren (Kennt ihr eine Literaturstelle, die das richtig anfasst?). Ich wuerde gerne mal einen Motor mit 10V und 50% PWM (bei etwa 20..30kHz) in Drehzahl und Drehmoment mit 5V und DC vergleichen. Ich kann mir nicht vorstellen, dass die Ergebnisse gleich sind. Ich koennte mir eher vorstellen-so wie Du es skizzierst-, dass PWM mehr auf eine Konstantstromsteuerung herauskommt, was fuer eine Drehzahlregelung nicht so toll ist. Der Motor wird "weich", d.h. die Drehzahl geht bei Belastung in die Knie und und der Motor geht bei Entlastung "durch", so wie in fruehen Versuchen, die Geschwindigkeit mit Vorschaltwiderstaenden zu steuern.
Ja, so sehe ich das auch. Wie das System Motor mit PWM Steuerung zu betrachten ist und wann ein Vergleich mit DC-Betrieb angebracht ist, hängt leider von der PWM-Freq, dem aktuellen Tastgrad und der Spezifikation des Motors (L/R etc) ab. Ich will damit sagen, dass der Vergleich mit gemittelter Spannung bei PWM-Betrieb nicht immer falsch sein muss, er funktioniert meines Wissens nach halt nicht uneingeschränkt. Man muss genau schauen, ob man an der ein oder anderen Stelle, in dem ein oder anderen Arbeitspunkt nicht einen Fehler macht, wenn man diesen Vergleich zieht.
Man kann sich das einfach überlegen, wenn man einfach so tut, als könne man einen Motor mit einer (14V) 500kHz PWM steuern.
Nimmt man mal den FH1717012SR: L/R = 15.2us
Es ist klar, dass bei 50% Tastgrad bei 500kHz = 1us Impuls, sich das nicht einfach mit der Betriebsart 7V DC (wegen 50% Tastgrad) vergleichen lässt.
Selbst bei einer 10 mal so langsamen PWM von 50kHz hat man 10us Impuls bei 50% Tastgrad. Also nur 2/3tel von L/R. Auch hier kann man das nicht mit 7V DC vergleichen.
Der Einfachheit halber habe ich hier nur 50% Tastgrad benutzt. Wenn man einen Tastgrad von bspw. unter 10% betrachtet wird es nochmals etwas anders.
Jetzt zu den Literaturstellen:
Mir ist leider auch nichts bekannt, wo ein Motor mit PWM-Steuerung bei verschiedenen Frequenzen und Tastgraden (z.B. im Beschleunigungsverlauf) betrachtet wird. Ich kenne eine Arbeit, bei der ein einfacher Glockenanker-Motor mit einer festen Impulssteuerung betrachtet wird. Es geht da allerdings um einen diskreten Arbeitspunkt, bei dem man tatsächlich von einer gemittelten Spannung ausgehen kann.
In anderen mir bekannten Texten (u.a. über Regelungen), wird das nur am Rand betrachtet, auch weil es da oft um BLDC Motoren geht oder um Motoren mit Encodern.
Motorhersteller wie Faulhaber, empfehlen bspw. eine PWM-Steuerung bei unter 20% Tastgrad schon gar nicht als Arbeitspunkt.
Ich habe auch mal zwei meiner Arbeitskollegen gefragt...
Der eine (ein Robotiker) meinte, dass es da wohl nichts geben wird, da diese Betriebsarten (hohe PWM-Freq niedriger Tastgrad) nicht als Arbeitspunkt benutzt werden. In der Industrie ist fast immer die Drehzahlkonstanz wichtig, also bei einem festen Arbeitspunkt. Der Motor und die PWM werden dann nach den Anforderungen ausgesucht.
Keiner kommt da auf die Idee einen Motor mit 12000 RPM Nenndrehzahl dort einzubauen, wo man nur einen Drehzahlbereich von 0 bis 10 RPM benötigt. (Getriebe nicht betrachtet)
Für uns ist doch der Drehzahl- und Drehmomentverlauf über die verschiedenen Tastgrade einer PWM interessant. K.a. ob das noch irgendow wichtig ist. Möglich, dass es desshalb anscheinend keine Arbeit darüber gibt.
 :
: Resume:
Ich denke, was sich hier zeigt, ist, dass wenn so ein System (Motor mit PWM gesteuert) beutzt wird, der benutzte Arbeitsbereich genau berechnet und kalkuliert wird. Dabei wird man sich das System so passend zu einem geforderten Arbeitspunkt suchen, dass es bei der Berechnung möglichst einfach ist und das System die Anforderungen möglichst effizient umsetzt.
Wir haben aber leider keine 2, 3, 4 diskreten Arbeitspunkte bei der Moba. Uns geht es viel mehr um den geschmeidigen Verlauf der "Arbeitspunkte" und geschmeidiges Fahren über alle (möglichen) Drehzahlen.
Das macht die Regelung eigentlich auch anspruchsvoller, da man diese eigentlich mit dem jeweiligen Arbeitspunkt verändern muss. Martin hat das auch so skizziert und versucht das in etwa umzusetzen.
Mit freundlichem Gruß,
Hermann
- CDC-User
- InterRegioExpress (IRE)
-
Beiträge: 294 Registriert am: 24.02.2017
RE: Motorsteuerung bei DCC-Decodern
![]() #406 von
CDC-User
, 06.09.2017 19:18
#406 von
CDC-User
, 06.09.2017 19:18
Hallo liebe Interessenten,
Ich hatte seit langem einmal wieder etwas Zeit für meine Modellbahn und die Tests der Motorsteuerung verschiedener Decoder.
Ich hatte in einem früheren Post schon einmal erwähnt, dass ich beim Test der Lastregelungen durch meinen Simulations-Aufbau ("manuelle" Eingabe der Ist-Größe --> Auswerten der Stellgröße) ein Übersteuern bei fast allen Decodern festgestellt habe.
Ich habe mir nun einen Testaufbau realisiert, mit dem ich das Beschleunigungsverhalten beim Anfahren einer Lok in der Praxis messen kann.
Messaufbau:
gerade und eben verlaufender Gleisabschnitt von 60 cm
Magnetband zw. die beiden Schienenstränge geklebt
Hallsensor an der Unterseite der Lok zw. den beiden Drehgestellen befestigt (Abstand zum Magnetband zw. 0.1 und 0.6mm)
=> Messgenauigkeit: 1μm, max. mögliche Abtastrate 50 kHz (alle 20μs)
Gemessen wird: Hallsensorwert (Distanz
Die vom Hallsensor gesendeten Impulse werden an einen Microcontroller weiter geleitet, verarbeitet und strukturiert, und dann über ein Interface in den PC zum Speichern und Auswerten gegeben.
Im PC kommt alle 100μs ein Wert an, der die Geschwindigkeit in μm/ms repräsentiert.
Durchführung:
Nacheinander wurden alle zu testenden Decoder in eine Testlok gesteckt, die FS 1 so langsam als nur möglich eingestellt und die Regelung bestmöglich eingestellt
Die ABV wurde zunächst ganz niedrig, dann ganz höch eingestellt. (-> es hat sich gezeigt, dass das beim Anfahren von FS0 auf FS1 keinen Unterschied macht; Auswirkung erst beim Beschleunigen von FS1 auf FSx erkennbar)
Lok auf das Testgleis, Zähler, des Microcontrollers auf Null gesetzt
Gemessen wurde für den Zeitraum von 2 Sekunden. (macht 100.000 Messwerte => 20.000 Geschwindigkeitswerte)
Folgende Grafik zeigt den Verlauf der Geschwindigkeit / Zeit, also der Beschleunigung, (die Geschwindigkeit wurde maßstabsgerecht auf km/h umgerechnet)
Es wurde nur jeder 100te Wert für die Grafik benutzt, so dass die Wertetabelle je Decoder 200 Werte umfasst.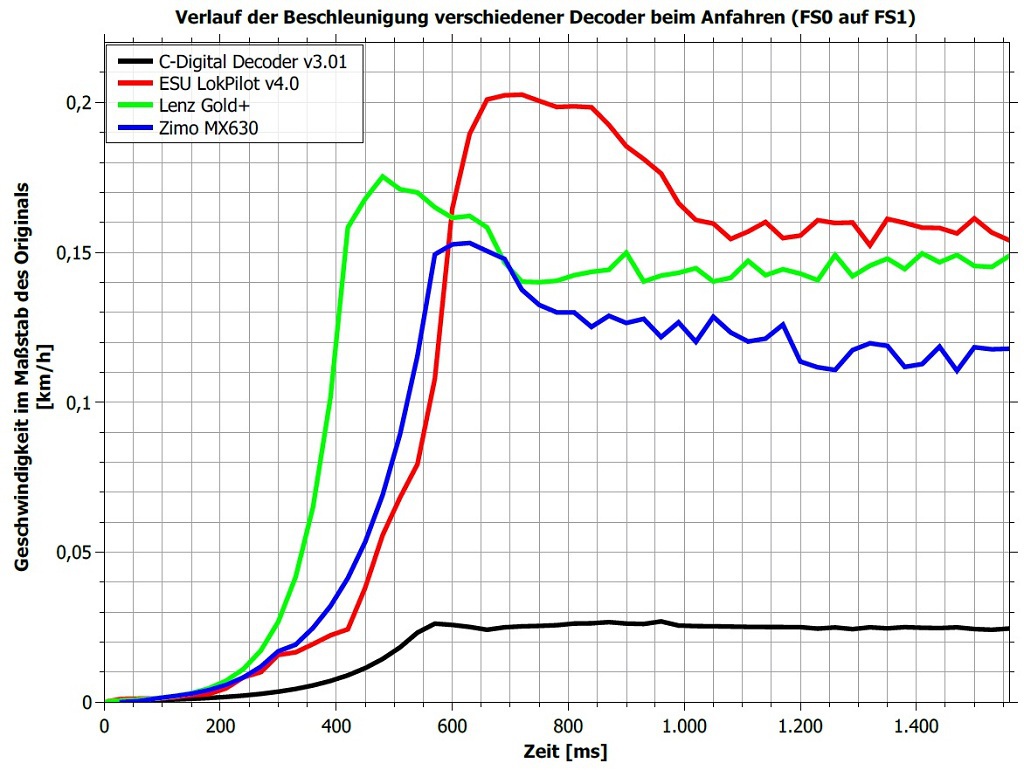
Jetzt zeigt sich auch in der Praxis ein Übersteuern der Lastregelung, was durchaus mit bloßem Auge erkennbar ist.
Das in einem Bruchteil von einer Sekunde Beschleunigen auf 0.2, 0.17 oder 0.16 km/h ist ebenfalls deutlich als Anfahrruck erkennbar.
Der C-Digital Decoder ist bei diesem Test wieder einmal einsame Spitze. Nicht nur die langsamstmögliche Geschwindigkeit ist deutlich niedriger, auch ein Übersteuern ist kaum feststellbar.
Das schnelle Ändern der Geschwindigkeit aus dem Stand, also die starke Beschleunigung, fällt beim Lenz Gold+ besonders auf. Da sich die Beschleunigung aber recht gleichmäßig ändert ist das Anfahren "schöner", als dass beim ESU. Bei diesem sind deutliche Knicke beim Anfahren vorhanden, welche für Rückeln stehen.
Diesen Ruck beim Anfahren kann man auch in zahlreichen Videos auf Youtube immer wieder sehen.
Fazit:
Das Phänomen des Übersteuerns konnte ich so in der Praxis nachweisen. Interessant ist auch, dass die Trägheit des Systems Motor mit Getriebe, Reibung und Traktion, ein Übersteuern der Regelung und ein ungestühmes Agieren der Motorsteuerung nicht verschleiern kann.
Bei Zeiten liefere ich evtl noch mehr Messdaten und andere Versuchszenarien (z.B. Lok beim Anfahren mit zusätzlicher Last).
Mit freundlichem Gruß,
Hermann
- CDC-User
- InterRegioExpress (IRE)
-
Beiträge: 294 Registriert am: 24.02.2017
RE: Motorsteuerung bei DCC-Decodern
![]() #407 von
SAH
, 06.09.2017 19:28
#407 von
SAH
, 06.09.2017 19:28
Guten Abend Hermann,
herzlichen Dank für Deine Auswertungen und das Schaubild.
Dies weckt nun eine Begehrlichkeit: es sollte meiner Meinung nach unbedingt auch ein D&H-Dekoder (DH21) getestet werden.
mit freundlichen Grüßen,
Stephan-Alexander Heyn
Stephan-Alexander Heyn
www.sheyn.de/Modellbahn/index.php
RE: Motorsteuerung bei DCC-Decodern
![]() #408 von
Gleichstromer
(
gelöscht
)
, 06.09.2017 20:08
#408 von
Gleichstromer
(
gelöscht
)
, 06.09.2017 20:08
Da wäre interessant zu wissen, um was für einen Motor es sich in der Lok handelt. Bei einem konventionellen DC-Motor würde ich annehmen, dass das Überschwingen dem Losbrechmoment durch Lager und vor allem die Magnete geschuldet ist. Ist das Losbrechmoment überwunden, und der Motor dreht sich, kann der Decoder zurück regeln.
Bei einem Glockenankermotor ist das Losbrechmoment schon geringer, nur noch die Lager verursachen ein Losbrechmoment. Das Überschwingen dürfte schon niedriger sein.
- Gleichstromer
RE: Motorsteuerung bei DCC-Decodern
![]() #409 von
CDC-User
, 06.09.2017 20:58
#409 von
CDC-User
, 06.09.2017 20:58
Guten Abend zusammen,
Habe eben mal noch mit dem D&H getestet. (Hatte ich eh noch vor )
Ich habe den DH10C benutzt. Das Ergebnis ist, wie zu erwarten, sehr gut. Nur bekomme ich die FS 1 nicht langsamer als 0.133 km/h.
Das Anfahren ist sanft. Das leichte Übersteuern ist kaum (eigentlich garnicht, nur wenn man die Messdaten kennt, meint man es sehen zu können...  ) erkennbar.
) erkennbar.
Die FS 1 beim C-Decoder habe ich gleich noch mal höher eingestellt (0.135 km/h), damit man besser mit den anderen vergleichen kann.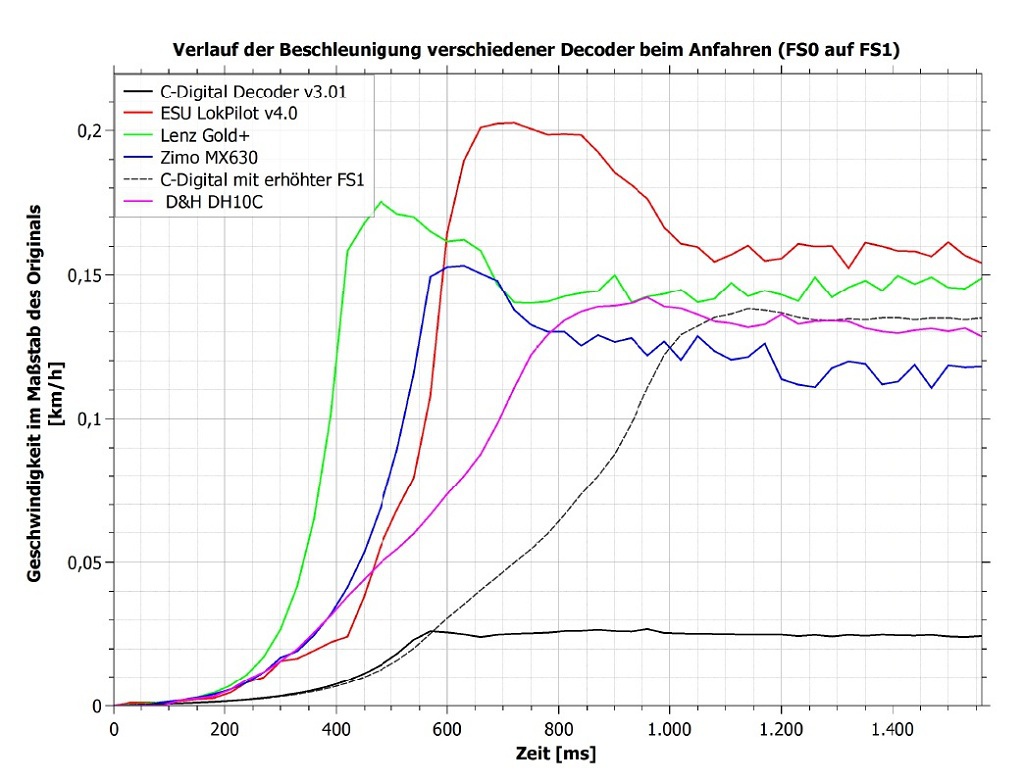
Getestet wurde mit der Lok aus diesem Video: https://www.youtube.com/watch?v=BVrqQOTRex0
Da ist ein 7 poliger Flachläufer Motor verbaut
Mit freundlichem Gruß,
Hermann
- CDC-User
- InterRegioExpress (IRE)
-
Beiträge: 294 Registriert am: 24.02.2017
RE: Motorsteuerung bei DCC-Decodern
![]() #410 von
CDC-User
, 06.09.2017 21:13
#410 von
CDC-User
, 06.09.2017 21:13
Hallo,
Zitat
Da wäre interessant zu wissen, um was für einen Motor es sich in der Lok handelt.
7 poliger Flachläufer
Zitat
Bei einem konventionellen DC-Motor würde ich annehmen, dass das Überschwingen dem Losbrechmoment durch Lager und vor allem die Magnete geschuldet ist. Ist das Losbrechmoment überwunden, und der Motor dreht sich, kann der Decoder zurück regeln.
Bei einem Glockenankermotor ist das Losbrechmoment schon geringer, nur noch die Lager verursachen ein Losbrechmoment. Das Überschwingen dürfte schon niedriger sein.
Ja, mit dem Losbrechmoment bin ich mir da nicht so sicher, weil sich zum Zeitpunkt des Übersteuerns (bei allen Decodern) die Lok ja schon mit min 0.415 mm/s bewegt.
Beim ESU ist die Geschwindigkeit z.B. mindestes für 40 Gegen-EMK Messzyklen über Soll, bis das Gegensteuern der Regelung Wirkung zeigt (Messfrequenz von 200 Hz vorausgesetzt).
Und ebenfalls komisch ist doch, dass das Losbrechen eine mechanische, physische (mehr oder weniger) Konstante ist, die für alle Decoder in gleichem Maß gilt. Das Anfahren der Decoder unterscheidet sich jedoch enorm. ???
Mit freundlichem Gruß,
Hermann
- CDC-User
- InterRegioExpress (IRE)
-
Beiträge: 294 Registriert am: 24.02.2017
RE: Motorsteuerung bei DCC-Decodern
![]() #411 von
Gleichstromer
(
gelöscht
)
, 06.09.2017 22:50
#411 von
Gleichstromer
(
gelöscht
)
, 06.09.2017 22:50
Hallo Hermann,
ist es nicht auch so, dass der Motor eine ausreichende Drehzahl haben muss, um überhaupt genügend Gegeninduktion aufbauen zu können? Die Empfindlichkeit der Decoder ist da sicherlich unterschiedlich.
Und beim Losbrechmoment und dem Drehmomentrippel ist es eben so, dass der erst Mal überwunden werden muss und es daher mehr oder weniger mit einem Ruck losgeht.
Ein Vergleich der Messungen noch ein Mal mit einem Glockenankermotor fände ich zumindest schon sehr interessant. Vielleicht ergeben sich zusätzlich neue Erkenntnisse.
- Gleichstromer
RE: Motorsteuerung bei DCC-Decodern
![]() #412 von
Erich Müller
, 07.09.2017 17:47
#412 von
Erich Müller
, 07.09.2017 17:47
Hallo,
mir scheinen da zwei Phänomene sich in den Graphen (nicht Grafen  ) abzubilden:
) abzubilden:
zum einen das Losbrechmoment, das zu einer gewissen Übersteuerung beim Anfahren führt (Motor dreht hoch und wird wieder heruntergeregelt); dies ist mit üblicher Regelungstechnik wohl kaum in den Griff zu bekommen. Das ist bei meinem Auto nicht anders: wenn der Tempomat auf 100 steht und ich nur 80 fahre, dann gibt er Gas und überschreitet zunächst mal leicht die 100, bevor er sich auf die richtige Geschwindigkeit einpendelt. (Und genau in dem Moment wurde ein Bekannter mal geblitzt... Autsch.) Sind alle Decoder, auch der C-Digital, mit demselben Motor getestet worden?
zum anderen eine Unruhe im Lauf der Motoren, nachdem der Anfahrruck überwunden ist. Nun ist der Maßstab recht fein, aber auch hier zeigt C-Digital, wie es besser geht... und ich interpretiere diese Unruhe wiederum als Überregeln. Auch das ist mir im Auto mal passiert, in einem langen Gefälle mit auflaufgebremstem Anhänger. Ohne Gas wurde das Auto langsamer und der Hänger begann zu bremsen; der Tempomat gab etwas Gas, und sofort wurde das Gespann zu schnell, der Tempomat nahm das Gas wieder auf 0... Ich meine mich zu erinnern, dass man da an den Regelungseinstellungen etwas machen kann, indem man etwa die Regelung von 100% auf 70% zurücknimmt. Wenn allerdings die vom Motor aufgenommene Energie so gering ist, dass 0 zu wenig, die nächsthöhere Stufe schon zu viel ist - dann wird es für den Decoder schwierig.
Wir waren uns aber, glaube ich mich zu erinnern, auch einig gewesen, dass es bei diesen extremen Langsamfahrten nicht um modellgerechte Geschwindigkeiten für eine Beharrungsfahrt handelt, sondern um Punkte einer möglichst gleitenden Anfahr- bzw. Bremskurve.
Freundliche Grüße
Erich
„Es hat nie einen Mann gegeben, der für die Behandlung von Einzelheiten so begabt gewesen wäre. Wenn er sich mit den kleinsten Dingen abgab, so tat er das in der Überzeugung, daß ihre Vielheit die großen zuwege bringt.“
Friedrich II. über Fr. Wilhelm I.
- Erich Müller
- ICE-Sprinter
-
Beiträge: 6.319 Registriert am: 03.12.2015
RE: Motorsteuerung bei DCC-Decodern
![]() #413 von
Gleichstromer
(
gelöscht
)
, 07.09.2017 18:42
#413 von
Gleichstromer
(
gelöscht
)
, 07.09.2017 18:42
Was ist das für ein Auto? So einen Tempomat habe ich noch nicht erlebt, der erst Mal übers Ziel hinausschießt. Ist auch schwer vorstellbar, denn der Tempomat kann ja schon vor Erreichen der Sollgeschwindigkeit das Gas zurücknehmen.
- Gleichstromer
RE: Motorsteuerung bei DCC-Decodern
![]() #414 von
Erich Müller
, 07.09.2017 19:27
#414 von
Erich Müller
, 07.09.2017 19:27
Peugeot, und der 120kW-Motor.
Der "Überschuss" ist ja nicht nennenswert (ca 3km/h), den würde man nicht unbedingt bemerken und normalerweise macht das auch nichts aus, aber nachdem der Bekannte da geblitzt wurde (er hatte aber wohl die polizeilichen Toleranzen beim Einstellen ausgereizt), habe ich mal darauf geachtet.
Freundliche Grüße
Erich
„Es hat nie einen Mann gegeben, der für die Behandlung von Einzelheiten so begabt gewesen wäre. Wenn er sich mit den kleinsten Dingen abgab, so tat er das in der Überzeugung, daß ihre Vielheit die großen zuwege bringt.“
Friedrich II. über Fr. Wilhelm I.
- Erich Müller
- ICE-Sprinter
-
Beiträge: 6.319 Registriert am: 03.12.2015
RE: Motorsteuerung bei DCC-Decodern
![]() #415 von
CDC-User
, 09.09.2017 18:10
#415 von
CDC-User
, 09.09.2017 18:10
Guten Abend,
[quote="Erich Müller" post_id=1723227 time=1504799255 user_id=26147]
Sind alle Decoder, auch der C-Digital, mit demselben Motor getestet worden?
[/quote]
Ja sicher. Alles andere wäre doch, unsinning ohne Aussagekraft. Es wurde immer die selbe Lok genommen (siehe Video früherer Beitrag), damit auch immer das selbe Getriebe, der selbe Motor und auch die selben 60 cm Teststrecke.
[quote="Erich Müller" post_id=1723227 time=1504799255 user_id=26147]
zum anderen eine Unruhe im Lauf der Motoren, nachdem der Anfahrruck überwunden ist. Nun ist der Maßstab recht fein, aber auch hier zeigt C-Digital, wie es besser geht... und ich interpretiere diese Unruhe wiederum als Überregeln.
[/quote]
Ich denke das der D&H Decoder und der C-Digitaldecoder hier eine gute Figur machen. Ich bin ebenso der Meinung, dass die Unruhen daher kommen, dass die Regelung auf Störgrößen, wie beispielsweise kleine Unstimmigkeiten im Getriebe, reagiert. Manche Decoder "übersteuern/ überregeln" bei diesen Störeinflüssen anscheinend deutlich stärker.
Ich möchte hier nochmals betonen, dass ich hier die tatsächliche Geschwindigkeit der Lok gemessen habe. Also nicht nur den Motor, sondern die komplette Lok, mit allen Störeinflüssen, wie diese sich beim Beschleunigen von FS 0 auf FS 1 verhält. Als Messsystem habe ich praktisch ein Längenmesssystem mit Magnetband verwendet, wie es auch bei Drehbänken oder Fräsmaschinen zum Einsatz kommt (natürlich so konfiguriert, dass es auch zu meinen Anforderungen passt).
Ein Bsp. für Interessierte: https://www.ke-next.de/automation/sensor...staben-345.html
[quote="Erich Müller" post_id=1723227 time=1504799255 user_id=26147]
Ich meine mich zu erinnern, dass man da an den Regelungseinstellungen etwas machen kann, indem man etwa die Regelung von 100% auf 70% zurücknimmt. Wenn allerdings die vom Motor aufgenommene Energie so gering ist, dass 0 zu wenig, die nächsthöhere Stufe schon zu viel ist - dann wird es für den Decoder schwierig.
[/quote]
Ich habe versucht, jeden Decoder vor Testantritt so gut wie möglich einzustellen. (Je Decoder wurden min. 20 Messreihen durchgeführt, und nur das beste Ergebnis dann für den Vergleich benutzt.)
[quote="Erich Müller" post_id=1723227 time=1504799255 user_id=26147]
Wir waren uns aber, glaube ich mich zu erinnern, auch einig gewesen, dass es bei diesen extremen Langsamfahrten nicht um modellgerechte Geschwindigkeiten für eine Beharrungsfahrt handelt, sondern um Punkte einer möglichst gleitenden Anfahr- bzw. Bremskurve.
[/quote]
JA, so auch meine Meinung. Es geht um ein möglichst geschmeidiges Fahrverhalten. Wichtig für die optische Darstellung großer Masse und damit Trägheit.
Mit freundlichem Gruß,
Hermann
- CDC-User
- InterRegioExpress (IRE)
-
Beiträge: 294 Registriert am: 24.02.2017
RE: Motorsteuerung bei DCC-Decodern
![]() #416 von
Marky
(
gelöscht
)
, 09.09.2017 22:34
#416 von
Marky
(
gelöscht
)
, 09.09.2017 22:34
[quote="Erich Müller" post_id=1723227 time=1504799255 user_id=26147]
....]Das ist bei meinem Auto nicht anders: wenn der Tempomat auf 100 steht und ich nur 80 fahre, dann gibt er Gas und überschreitet zunächst mal leicht die 100, bevor er sich auf die richtige Geschwindigkeit einpendelt.
[/quote]
Hallo,
da braucht Dein Auto sicher ein Firmwareupdate damit das mit der Geschwindigkeitsregelung besser funktioniert
Meine Karre macht das nicht. Da gibts kein Überschuß bezogen auf Dein obiges Beispiel.
Gruß Markus
P.S. Sorry für ein klein wenig Off Topic  ops:
ops:
- Marky
RE: Motorsteuerung bei DCC-Decodern
![]() #417 von
md95129
, 11.09.2017 20:13
#417 von
md95129
, 11.09.2017 20:13
Hallo Hermann,
selbst als "eingefleischter Noergler" habe ich an Deinen tollen Messungen nichts auszusetzen, im Gegenteil. An den Resultaten gibt es nichts zu deuteln, sie sind eindeutig. Darf ich trotzdem ein paar Anregungen geben?
1. Ist der Restripple bei konstanter Fahrt "Rauschen" oder sieht man bei entsprechender zeitlicher/Geschwindikeits-Aufloesung Ankerfuehligkeit, die von verschiedenen Decodern besser oder schlechter verarbeitet wird.
2. Ein interessantes Experiment wuerde das Verhalten bei Lastwechsel sein, z.B. Anfahren an einen schweren Zug oder sogar an einen Prellbock.
Ich bin zur Zeit wieder auf der Hardwareseite (Lokbau in HOm/G/1: taetig, nachdem ich wieder sehe, was ich tue. Vielleicht arbeite ich demnaechst auch wieder an meinem Decoder, just for fun und mit Allem, was ich hier gelernt habe.
taetig, nachdem ich wieder sehe, was ich tue. Vielleicht arbeite ich demnaechst auch wieder an meinem Decoder, just for fun und mit Allem, was ich hier gelernt habe.
Regards
Henner,
ex-Donkey Doktor der EDH Lumber
Schamlose Selbstbeweihräucherung: Eigenbauten eines alten Neulings.
US Waldbahnen/Echtdampf-Eigenbau
- md95129
- EuroCity (EC)
-
Beiträge: 1.071 Registriert am: 15.01.2017 Ort: Berlin Gleise IIm Echtdampf,H0m Steuerung DCC Eigenbau Stromart Digital
RE: Motorsteuerung bei DCC-Decodern
![]() #418 von
CDC-User
, 13.09.2017 09:02
#418 von
CDC-User
, 13.09.2017 09:02
Hallo Henner,
Zitat
selbst als "eingefleischter Noergler" habe ich an Deinen tollen Messungen nichts auszusetzen, im Gegenteil. An den Resultaten gibt es nichts zu deuteln, sie sind eindeutig.
Schön, dass dir meine Messung gefällt. Ich selbst bin dieses mal gar nicht so zufrieden, weil mich ein paar Dinge wundern . Dazu bei Zeiten mehr...
Zitat
1. Ist der Restripple bei konstanter Fahrt "Rauschen" oder sieht man bei entsprechender zeitlicher/Geschwindikeits-Aufloesung Ankerfuehligkeit, die von verschiedenen Decodern besser oder schlechter verarbeitet wird.
Ich denke weder noch. Rauschen kann ich ausschließen und eine Ankerfühligkeit=Polfühligkeit? kann das nicht sein. Dafür sind die Drehzahlschwankungen zu stark. Wenn man den Motor (alleine) vorsichtig von Hand dreht, kann man keinen Pol spühren. Ich meine, dass das eher von einer etwas übersteuerten Reaktion auf Getriebeschwächen, Lagerreibung, Schlupf, etc. zurückzuführen ist.
Ich habe auch schon ein paar andere Loks mit Glockenanker getestet etc.(, bin aber mit meinen Testreihen noch nicht durch, darum hab ich noch nichts gepostet,) und da sieht man auch so ähnliche Dinger. Nur unter 120g Zuglast über eine Umlenkrolle sieht es wieder anders aus.
Zitat
2. Ein interessantes Experiment wuerde das Verhalten bei Lastwechsel sein, z.B. Anfahren an einen schweren Zug oder sogar an einen Prellbock.
Ja, unter Last habe ich schon mal ein paar Sachen ausprobiert... da werd ich wohl noch was online stellen.
Leider bin ich jetzt für 2 bis 3 Monate im Ausland und kann höchstens diskutieren. 
Den Messaufbau hatte ich von Martin geliehen (Danke nochmal dafür). Der hat sich das damals zur Entwicklung seines Decoders gebaut. Das Programm zur Auswertung ist allerdings von mir.
Wenn ich zurück bin, leihe ich es mir nochmal und versuche noch ein paar Dinge.
Zitat
Ich bin zur Zeit wieder auf der Hardwareseite (Lokbau in HOm/G/1:
Viel Spaß und Erfolg dabei. Ich werde hier immer wieder, wenn es etwas neues gibt, berichten und testen, wenn ich die Zeit finde.
Mit freundlichem Gruß,
Hermann
- CDC-User
- InterRegioExpress (IRE)
-
Beiträge: 294 Registriert am: 24.02.2017
RE: Motorsteuerung bei DCC-Decodern
![]() #419 von
WolleH
, 20.10.2017 22:06
#419 von
WolleH
, 20.10.2017 22:06
Hallo Hermann,
die Werte, die du für den ESU-Decoder gemessen hast, kann ich nicht nachvollziehen.
Ich habe andere Werte erzielt.
Könntest du bitte einmal kurz eine Liste aller relevanten CVs, die du beim ESU eingestellt hast, hier posten?
Danke im Voraus
Wolfgang
Gruß
Wolfgang
- WolleH
- InterRegio (IR)
-
Beiträge: 184 Registriert am: 13.10.2015

RE: Motorsteuerung bei DCC-Decodern
![]() #420 von
CDC-User
, 20.10.2017 22:20
#420 von
CDC-User
, 20.10.2017 22:20
Guten Abend Wolfgang,
Zitat
die Werte, die du für den ESU-Decoder gemessen hast, kann ich nicht nachvollziehen.
Könntest du das etwas spezifizieren, was genau du nicht nachvollziehen kannst?
Zitat
Ich habe andere Werte erzielt.
Wie sehen deine WErte aus? Wie dein Messverfahren? Mit welcher Lok, bzw. Motor wurde gemesen? Kurzum: Könntest du deine Messumgebung etc. genauer beschreiben und deine Werte mitteilen?
Zitat
Könntest du bitte einmal kurz eine Liste aller relevanten CVs, die du beim ESU eingestellt hast, hier posten?
Klar, mache ich gerne, sobald ich wieder zu Hause bin. Habe sie im moment hier nicht vorliegen...
Bitte um etwas Gedult. Erinnere mich gerne nochmals daran in einem Monat, fals ich's bis dahin nicht gemacht habe.
Mit freundlichem Gruß,
Hermann
- CDC-User
- InterRegioExpress (IRE)
-
Beiträge: 294 Registriert am: 24.02.2017
RE: Motorsteuerung bei DCC-Decodern
![]() #421 von
CDC-User
, 05.11.2017 13:46
#421 von
CDC-User
, 05.11.2017 13:46
Zitat
Könntest du bitte einmal kurz eine Liste aller relevanten CVs, die du beim ESU eingestellt hast, hier posten?
Danke im Voraus
Wolfgang
Hallo Wolfgang,
Hier sind die CV's die in dem Decoder, mit dem ich genau diese Messwerte bei besagter Lok bekommen habe, eingetragen sind.
CV2 = 1
CV3 = 140
CV5 = 255
CV10 = 6 [1/ (6 mal 0.00102s) = 163.4Hz]
CV49 = Bit1=2 (40kHz)
CV51 = 1
CV52 = 8
CV53 = 120
CV54 = 35
CV55 = 30
CV56 = 255
CV124 = Bit4=16 (aus)
Mit freundlichem Gruß,
Hermann
- CDC-User
- InterRegioExpress (IRE)
-
Beiträge: 294 Registriert am: 24.02.2017
RE: Motorsteuerung bei DCC-Decodern
![]() #422 von
WolleH
, 05.11.2017 20:11
#422 von
WolleH
, 05.11.2017 20:11
Hallo Hermann,
vielen Dank für die Werte.
Sehr viele sind ähnlich meinen oder sogar identisch.
Das hilft mir bei meinen Versuchen weiter, da ich diese schon mal als "gut" abhaken kann.
Klar, unterschiedliche Motoren etc. - aber z.T. sind es ja auch Grundeinstellungen.
Mir fällt nur die CV 52 auf, die nach meinen Erfahrungen eher im Bereich 0 bis 2 angesiedelt sein sollte, da sie einen "Ruck" beim Anfahren verursachen kann.
Hast du die Möglichkeit, mit kleiner CV 52 nochmals zu messen?
Lieber Gruß
Wolfgang
Gruß
Wolfgang
- WolleH
- InterRegio (IR)
-
Beiträge: 184 Registriert am: 13.10.2015
RE: Motorsteuerung bei DCC-Decodern
![]() #423 von
CDC-User
, 06.11.2017 16:24
#423 von
CDC-User
, 06.11.2017 16:24
Zitat
vielen Dank für die Werte.
....
Mir fällt nur die CV 52 auf, die nach meinen Erfahrungen eher im Bereich 0 bis 2 angesiedelt sein sollte, da sie einen "Ruck" beim Anfahren verursachen kann.
Hast du die Möglichkeit, mit kleiner CV 52 nochmals zu messen?
Lieber Gruß
Wolfgang
Guten Abend Wolfgang,
Ich habe bereits 21 Messreihen für den ESU v4 durchgeführt. Für meine hier veröffentlichten Grafik ist nur das "beste" Ergebniss verwendet worden.
Evtl. kann ich bei Zeiten eine Grafik machen, die alle 21 Messreihen des ESU zeigt. Momentan habe ich für diese Dinge jedoch wenig Zeit.
Ich kann dir aber sagen was das Problem mit einem niedrigeren CV52 war;
CV52 = 0 bis 6 :
Die Regelung macht beim Anfahren zwar einen nicht so starken Sprung, jedoch ist dann die Vmin nicht bei 0.158 km/h sondern über 0.171 km/h. (Und die Geschwindigkeit fängt das Schwingen an)
Ich erkläre mir das so, dass dann der Integral-Regler mehr dafür sorgen muss, dass die Soll-EMK eingehalten wird. Die Drehzahl schwankt bei den extrem langsamen Drehzahlen stärker, da die Reibungskräfte etc. im Verhältnis zur Antriebskarft größer ausfällt. Folglich muss die Regelung dauernd nachjustieren und das möglichst schnell. Der Integralregeler ist aber der "langsame" Regler und es treten Schwankungen mit größerem Zeitintervall, höherer Amplitude und damit einer höheren Durchschnittsgeschwindigkeit auf.
Ich bin dann einen Kompromiss eingegangen und schließlich bei Wert 8 gelandet. Es mag sein, dass 6 oder 7 auch noch ginge (andere CVs unverändert). Ich muss momentan davon ausgehen, dass ein Untreschied gering ausfallen würde.
Im übrigen wäre es mir eigentlich lieber gewesen CV10 auf 4 zu stellen (245Hz), was die Geschwindigkeitsschwankungen reduziert, allerdings ist das Motorgeräusch dann so deutlich und störend, dass ich diese Messreihe nicht als "beste" verwenden wollte. Es sollte ja auch zu den anderen Decodern vergleichbar sein und der C-Digital, D&H und Zimo sind deutlich leiser.
Ebenfalls interessant ist, was passiert, wenn man den Integral-Regler höher einstellt (CV51=20 u. CV55=95): Da höhrt man dann mehr Kanckgeräusche des Motors und er fährt weniger sanft.
Komischerweise, weil eigentlich sollte ja (laut BDA) bei einem Motor, der eine geringe Trägheit aufweist, was der Faulhaber Flachläufer ohne Schwungmasse ja tut, der I-Regler Wert hoch eingestellt werden....? Das hat sich aber in der Praxis als kontraproduktiv erwiesen.
Mit freundlichem Gruß,
Hermann
- CDC-User
- InterRegioExpress (IRE)
-
Beiträge: 294 Registriert am: 24.02.2017
RE: Motorsteuerung bei DCC-Decodern
![]() #424 von
WolleH
, 06.11.2017 17:14
#424 von
WolleH
, 06.11.2017 17:14
Hallo Hermann,
danke für die interessanten Infos.
Das reicht mir schon für meine Gedankengänge, weitere Arbeit brauchst du dir nicht mehr machen, merci.
Die Problematik mit dem I-Regler hatte ich schon vermutet, aber das bisher nicht weiter vertieft...
Durch deine Ausführungen habe ich nun aber auch den grundlegenden Unterschied in unseren Philosophien erkannt. Zumal in einem anderen Thread auch, sinngemäß, erwähnt wurde, irgendwas sein immer, und letztendlich käme es darauf an, was man persönlich noch als störend empfindet, um ein gutes oder schlechtes Urteil abzugeben.
Ich persönlich habe nämlich die meisten Loks mit Sounds, und die habe ich alle so überarbeitet und mit solchen Lautsprecherteilen ausgerüstet, dass mich der Sound nie stört, weil er immer sauber klingt. Die Loks tönen also alle vor sich hin.
Deshalb habe ich absolut keine Probleme mit mit CV10 = 4, und bei den "Eisenmotoren" fahre ich mit 20 kHz und selbst die adaptive Lastregelung (klingt wie "Taurus rückwärts") hört man nicht mehr.
Klar, irgendwie habe ich das nicht so gesehen wie ihr, dass auch der Lärm eine Rolle spielt.
Habe gerade mal eine Lok leiser (Motorregelung) gemacht - und stimmt, läuft schlechter. Leise und "smooth" kann der ESU anscheinend nicht - ist mir noch nie so deutlich aufgefallen . . . ;-(
Gruß
Wolfgang
- WolleH
- InterRegio (IR)
-
Beiträge: 184 Registriert am: 13.10.2015
RE: Motorsteuerung bei DCC-Decodern
![]() #425 von
StephanLeist
, 16.01.2018 09:47
#425 von
StephanLeist
, 16.01.2018 09:47
Hallo,
Ich habe da irgendwie ein Verständnisproblem, wie so eine Regelung funktioniert. ops:
Jetzt habe ich diesen Faden hier gefunden und hoffe einer der Aktöre hier kann mir das für Laien mal erklären.
Ich habe mir diese Seite durchgelesen http://www.der-moba.de/index.php/Wie_arb...Lastregelung%3F und habe immernoch / oder wieder neue Fragen.
Es geht um meinen Lopi V4.0 (ESU). In meiner BA steht auf Seite 47/48 unter 11.3 Lastregelungsfrequenz, dass diese standardmäßig mit 40 kHz läuft. Zitat aus BA: "Normalerweise arbeitet die Lastregelung des LokPilot Decoders mit 40 kHz."
Ich weiß bereits, dass der Motor mit einer PWM angesteuert wird und diese eine bestimmte Frequenz hat, welche angibt, wie häufig ein Einschaltimpuls pro Sekunde auf den Motor gegeben wird. Die Breite dieser Einzelimpulse wird praktisch über die gewählte Fahrstufe festgelegt?
Nach dem Lesen der Seite oben auf "der-moba.de" und hier im Faden, meine ich verstanden zu haben, dass immer wenn ein PWM-Impuls vorbei ist, der Dekoderausgang gerade abgeschalten hat, dieser eine Generatorspannung drehzahlabhängig erzeugt. Frage1: Warum macht der Motor das nur, wenn der Impuls abgeschaltet ist? Er dreht sich mit Impuls doch auch?
hier eine Grafik die mir geholfen hat: http://www.der-moba.de/images/6/64/Lastregelung_PWM.jpg
Bei meinem Lopi V4.0 ist diese PWM-Frequenz 40kHz und die Lastregelungsfrequenz ebenfalls. Unter 11.3 steht aber weiter:
"[...]Der Motor hat wenig „Kraft“ aufgrund hoher (Eigen)induktivität
Die in der Lok verbauten Entstörmittel [...] stören die Lastregelung, können aber nicht entfernt werden
[...]Löschen Sie Bit 1 in CV 49, um die PWM-Frequenz von ca. 40 kHz auf ca. 20 kHz zu halbieren."
Man soll also die PWM-Frequenz halbieren. Was ist dann mit der Lastregelungsfrequenz bleibt die dann gleich? Oder ist die dann automatisch auch halbiert, sodass es wieder zu dem Bild oben passt? Wenn dem nicht so wäre, würde die Regelung doch häufiger (eigentlich genau doppelt so oft?) messen und regeln pro Lücke zwischen zwei PWM-Ein-Impulsen? 
Hier brauche ich dringend Hilfe. Ich möchte diese Regelung gerne besser verstehen, damit ich meine ESU Dekoder besser einstellen kann. Die geteilten Videos über Langsamfahrten haben bei mir einen Begehr geweckt auch wenn der ESU Dekoder vielleicht nicht der beste darin ist, möchte ich gerne etwas mehr herauskitzeln.
Also kann mir bitte einer der hier anwesenden Experten das noch einmal für "Dumme" erklären?
Danke schon einmal. 
Freundliche Grüße,
Stephan Leist
- StephanLeist
- InterRegio (IR)
-
Beiträge: 141 Registriert am: 02.10.2017
-
- Ähnliche Themen
- Antworten
- Zugriffe
- Letzter Beitrag
-
- Mehano G1000 DC und Zimo Decoder
Erstellt im Forum Digital von faraway - 12
- 529
- Letzter Beitrag von
faraway

28.12.2022
- Mehano G1000 DC und Zimo Decoder
-
- Probleme mit D&H Sound Decoder
Erstellt im Forum Digital von lokhenry - 18
- 1250
- Letzter Beitrag von
12345
30.04.2022
- Probleme mit D&H Sound Decoder
-
- Passender Decoder und Digitalzentrale für digitalen Betrieb einer Feldbahn
Erstellt im Forum Schmalspurbahn, Feldbahn von Robo02 - 19
- 2318
- Letzter Beitrag von
Claus60
19.03.2022
- Passender Decoder und Digitalzentrale für digitalen Betrieb einer Feldbahn
-
- Motorsteuerung am Decoder einstellen - Zimo mit Roco Lok
Erstellt im Forum Digital von - 5
- 1427
- Letzter Beitrag von
trenino
14.04.2020
- Motorsteuerung am Decoder einstellen - Zimo mit Roco Lok
-
- Weichenservo für Märklin Decoder m83 60832
Erstellt im Forum Elektrik und Elektronik von - 21
- 6873
- Letzter Beitrag von
Jürgen Moba
10.01.2019
- Weichenservo für Märklin Decoder m83 60832
-
- Innenbeleuchtung an Funktions-Decoder anschließen usw…….
Erstellt im Forum Anfängerfragen von - 13
- 3988
- Letzter Beitrag von
Railstefan
29.12.2016
- Innenbeleuchtung an Funktions-Decoder anschließen usw…….
-
- Was sollen wir mit den alten (Decoder) machen
Erstellt im Forum Digital von - 7
- 1747
- Letzter Beitrag von
Berderwe
04.11.2012
- Was sollen wir mit den alten (Decoder) machen
-
- CV Werte Motorsteuerung Lopi V4 Roco 5-Poler
Erstellt im Forum Digital von - 2
- 754
- Letzter Beitrag von
trashmaster
12.02.2012
- CV Werte Motorsteuerung Lopi V4 Roco 5-Poler
-
- Sind die "neuen" Märklin Decoder wirklich neu?
Erstellt im Forum Digital von - 48
- 7439
- Letzter Beitrag von
Ruhr-Sider
03.02.2010
- Sind die "neuen" Märklin Decoder wirklich neu?
