#include <MobaTools.h>
#include <EEPROM.h>
// Gleisstellpultweiche Nr.: 1, 2, 3, 4, 5, 6
const byte servoW[] ={ 6, 2, 19, 7, 33, 31}; //Array Weichen Pins
const byte WAnschlagMIN[] ={ 80, 120, 120, 70, 60, 100}; //Array Weichenauslenkung Minimum (geradeaus)
const byte WAnschlagMAX[] ={120, 70, 70, 120, 100, 50}; //Array Weichenauslenkung Maximum (abbiegen)
const byte servoSpeedW[] ={ 10, 10, 10, 10, 10, 10}; //Array Servogeschwindigkeit
const byte buttonGeradeW[] ={ A8, A11, A5, 38, A14, 37}; //Array Pins "Taster geradeaus"
const byte buttonAbbiegenW[] ={A10, A12, A4, A7, A15, 39}; //Array Pins "Taster abbiegen"
const byte ledW[] ={ 44, 48, 42, 46, 50, 40}; //Array LEDs
const byte addr[] ={ 1, 2, 3, 4, 5, 6}; //Array eeprom address
const byte ANZAHL_WEICHEN = sizeof(servoW);
// Gleisstellpultentkuppler Nr.: 1, 2, 3, 4, 5, 6, 7, 9, 10
const byte servoE[] ={ 4, 36, 29, 5, 25, 35, 3, 23, 27}; //Array Entkuppler Pins
const byte EAnschlagMIN[] ={ 50, 130, 55, 120, 70, 70, 60, 60, 120}; //Array Entkupplerauslenkung Minimum
const byte EAnschlagMAX[] ={ 80, 100, 90, 90, 90, 95, 90, 90, 90}; //Array Entkupplerauslenkung Maximum
const byte servoSpeedE[] ={ 20, 20, 20, 20, 20, 20, 20, 20, 20}; //Array Servogeschwindigkeit
const byte buttonE[] ={ A9, A13, A0, A3, A6, 13, 52, A1, A2}; //Array Pins "Taster Entkuppler"
const byte ANZAHL_ENTKUPPLER = sizeof(servoE);
const byte autoOff = 1; //damit die Servos nicht brummen...
Servo8 servoWeiche[ANZAHL_WEICHEN]; //Array Weichen 1 bis 6
Servo8 servoEntkuppler[ANZAHL_ENTKUPPLER]; //Array Entkuppler 1 bis 7, 9 und 10
EggTimer myTimerE[ANZAHL_ENTKUPPLER]; //Entkuppler sollen 5 sec. aktiv sein
byte buttonStatusGeradeW[ANZAHL_WEICHEN] ={0,0,0,0,0,0};
byte buttonStatusAbbiegenW[ANZAHL_WEICHEN]={0,0,0,0,0,0};
byte buttonStatusE[ANZAHL_ENTKUPPLER] ={0,0,0,0,0,0,0,0,0};
byte i; //Zählvariable Weichen
byte j; //Zählvariable Entkuppler
void setup() {
for (i=0; i<ANZAHL_WEICHEN; i++){
pinMode(buttonGeradeW[i], INPUT);
pinMode(buttonAbbiegenW[i], INPUT);
pinMode(ledW[i], OUTPUT);
if (EEPROM.read(addr[i]) == WAnschlagMIN[i]) // Wenn letzte Weichenposition Geradeaus war...
{
digitalWrite(ledW[i], HIGH); // dann wird LED grün geschaltet, ansonsten bleibt sie rot
}
servoWeiche[i].attach(servoW[i], autoOff );
servoWeiche[i].setSpeed(servoSpeedW[i]);
servoWeiche[i].write(EEPROM.read(addr[i])); // Bewege Servo zur letzten im EEPROM gespeicherten Position
}
for (j=0; j<ANZAHL_ENTKUPPLER; j++){
pinMode(buttonE[j], INPUT);
servoEntkuppler[j].attach(servoE[j], autoOff );
servoEntkuppler[j].setSpeed(servoSpeedE[j]);
}
}
void loop() {
// Schleife für Weichen
for (i=0; i<ANZAHL_WEICHEN; i++){
buttonStatusGeradeW[i]=digitalRead(buttonGeradeW[i]);
buttonStatusAbbiegenW[i]=digitalRead(buttonAbbiegenW[i]);
if (buttonStatusGeradeW[i] == HIGH)
{
digitalWrite(ledW[i], HIGH);
EEPROM.write(addr[i], WAnschlagMIN[i]); //Schreibe Zielposition in EEPROM
servoWeiche[i].write(WAnschlagMIN[i]);
}
else
{
if (buttonStatusAbbiegenW[i] == HIGH)
{
digitalWrite(ledW[i], LOW);
EEPROM.write(addr[i], WAnschlagMAX[i]); //Schreibe Zielposition in EEPROM
servoWeiche[i].write(WAnschlagMAX[i]);
}
else
{
}
}
}
// Schleife für Entkuppler
for (j=0; j<ANZAHL_ENTKUPPLER; j++){
buttonStatusE[j]=digitalRead(buttonE[j]);
if (buttonStatusE[j] == HIGH) //wenn der Entkuppler-Taster betätigt wird...
{
myTimerE[j].setTime(5000); //sollte der Timer auf 5 Sekunden gestellt werden und starten...
servoEntkuppler[j].write(EAnschlagMAX[j]); //... und das Servo auf 110 Grad (Entkuppeln) gehen...
}
else // wenn der Taster losgelassen wurde ...
{
if (myTimerE[j].running()==false) //...und wenn der Timer abgelaufen ist ...
{
servoEntkuppler[j].write(EAnschlagMIN[j]); //...wieder auf 75 Grad (Ruhezustand)
}
}
}
}





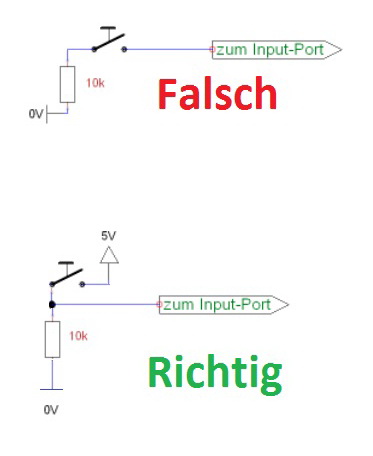
 . Ist ja die Frage, ob die Logik so überhaupt stimmt und der Eingang im Sketch wirklich auf FALSE geprüft wird - sonst müsste der Taster ja gegen +5V ...
. Ist ja die Frage, ob die Logik so überhaupt stimmt und der Eingang im Sketch wirklich auf FALSE geprüft wird - sonst müsste der Taster ja gegen +5V ...






 . Das mit den leeren Klammern funktioniert ja nur da, wo Du dem Array auch unmittelbar Werte zuordnest. Nur dann kann der Compiler anhand der Anzahl der zugeordneten Werte die Größe des Arrays selbst bestimmen.
. Das mit den leeren Klammern funktioniert ja nur da, wo Du dem Array auch unmittelbar Werte zuordnest. Nur dann kann der Compiler anhand der Anzahl der zugeordneten Werte die Größe des Arrays selbst bestimmen. 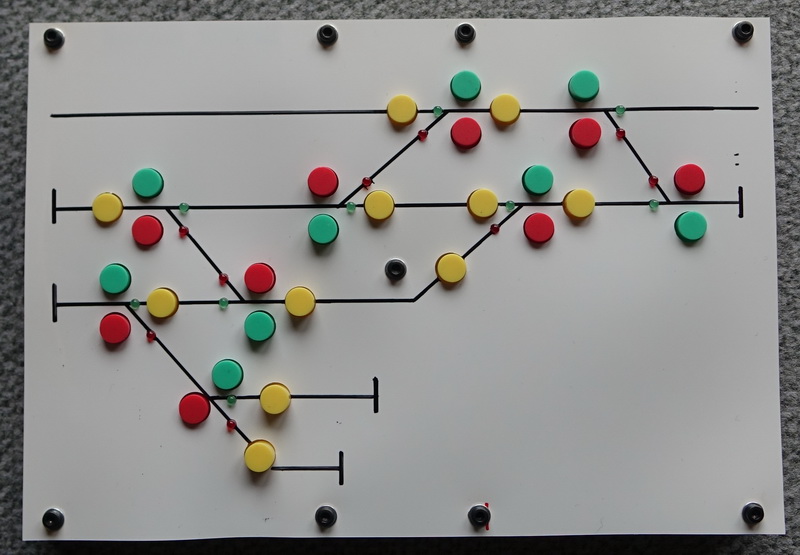

 ops: Aber zu Deiner Frage wegen den 100 000
ops: Aber zu Deiner Frage wegen den 100 000



 kann jeden Block auf jeden Regler legen, mit Verriegelung natürlich. Hat mir eben Spaß gemacht - das Austüfteln. Und ist einfach in der Wartung. Die Relais sind gesteckt und ich habe noch eine ganze Kiste vol davon
kann jeden Block auf jeden Regler legen, mit Verriegelung natürlich. Hat mir eben Spaß gemacht - das Austüfteln. Und ist einfach in der Wartung. Die Relais sind gesteckt und ich habe noch eine ganze Kiste vol davon  Aber Nichtsdestotrotz - der Thread ist hochinterressant
Aber Nichtsdestotrotz - der Thread ist hochinterressant 
