
Wo hast du die Leiterbahnen zum Motor unterbrochen, vor oder nach den Entstörbauteilen? Sprich: sind die Entstörbauteile noch mit dem Motor verbunden oder jetzt vor dem Decoder? Die Entstörbauteile müssen da am Motor bleiben. Wie sieht es mit dem Motor selbst aus? Wenn der einen schön ölversifften Kollektor hat funkt der dermaßen das man da nix mehr entstören kann...
Bürstenfeuer ist ja auch gleichbedeutend mit Hochspannung, trotz Schutzbeschaltung kann ein "zu viel" davon auch den Decoder grillen oder, häufiger, zum Absturz bringen. Ist auch nur ein Computer. Das sind dann die Beiträge "rast plözlich los", "bleibt einfach immer mal wieder stehen" o.ä. nach Decodereinbau.
Sowas hatte ich schon oft auf dem Tisch, meist einfach massiv versifft und/oder Entstörbauteile planlos vollständig rausgerissen. Bei vorhandener Schnittstelle fasst man die niemals an, Ausbau nur wenn der Decoderhersteller es ausdrücklich in der Anleitung schreibt.
Hab erst gestern eine "Anna" von Fleischmann (die 4000) auf dem Tisch gehabt, für fünf Ä abgegriffen weil "läuft nicht/schlecht". Die hat im Führerhaus blau geleuchtet ob des Bürstenfeuers. Nach gründlicher Entölung läuft sie im Rahmen ihrer Möglichkeiten ziemlich manierlich mit kaum noch erkennbarem Bürstenfeuer. Jetzt ein Spur N-Decoder aus meiner Grabbelkiste drin und ein 100yF-Kondensator als Puffer, jetzt gehen sogar Weichen 
Von Kato hab ich nur den ETA 517 im Bestand, der Motor ist da wartbar, Bürsten können herausgenommen werden und damit kommt man auch an den Kollektor.
Grundsätzlich gilt IMMER: Ein Triebfahrzeug muss analog perfekt laufen, sonst bringt Digital nur Stress. Wurde hier im Forum garantiert schon hunderte Male geschrieben. Und auch mein letzter Neuzugang Fleischmann 4336 BR 110, der erstmal ganz manierlich lief, hatte bei genauer Betrachtung extremen Putzbedarf. Die Fleischmann-Flachläufer arbeiten nämlich auch in versifftem Zustand noch erstaunlich gut. Aber mit sauberem Kollektor, entölten Bürsten und gereinigtem und sparsam abgeschmierten Getriebe noch viel besser...vor dem Putzen etwa 400 mA bei 12 V, nach dem Putzen 120 mA ohne Last am Haken.
 StummisÝModellbahnforum
StummisÝModellbahnforumwww.stummiforum.de
RE: Entstörung von Motoren bei Digitalisierung
![]() #26 von
Stahlblauberlin
, 04.04.2022 11:23
#26 von
Stahlblauberlin
, 04.04.2022 11:23
- Stahlblauberlin
- Metropolitan (MET)
-
Beitr‰ge: 3.522 Registriert am: 07.03.2022 Ort: Berlin Spurweite H0, Z, G Steuerung Roco digital, Z21-Nachbau Stromart DC, Digital, Analog

RE: Entstörung von Motoren bei Digitalisierung
![]() #27 von
Stahlblauberlin
, 04.04.2022 12:09
#27 von
Stahlblauberlin
, 04.04.2022 12:09
Zitat von Heinzi im Beitrag #10Zitat von WolleH im Beitrag #2
ESU ist weiterhin bei 40 kHz und das macht anscheinend viele Probleme.
Welcher Art sind denn die Probleme? Hat man doch doch die ganzen vergangenen Jahre überall gelesen, dass eine höhere Ansteuerfrequenz den Motor schone und ein ruhigeres laufen ergeben soll!
Das Thema Ansteuerungsfrequenz ist so eine Sache. Im Hinterkopf ist dabei zu behalten das es hier nicht um eine Wechselspannung sondern um eine pulsierende Gleichspannung geht. Bei normalen Motoren mit geblechten Eisenankern sind die Induktivitäten so groß das praktisch alles jenseits von ein paar wenigen Khz geglättet und damit zu einem fast "sauberen" Gleichtrom wird.
Das schont die Motoren und die Ohren. Steinzeit-Decoder machen sich ja gerne durch brummende oder pfeifende Motoren bemerkbar, das wird mit den höheren Frequenzen so vermieden. Die große Bahn verwendet ja auch Glättungsdrosseln um die pulsierende Gleichspannung im Zwischenkreis zu glätten bevor es an die Motorensteller geht...
Glockenanker-Motoren haben mangels fehlendem Eisenkern eine um Grössenordnungen niedrigere Induktivität. Damit ist der Glättungseffekt entsprechend kleiner. Viel wichtiger: damit ist bei jedem Stromstoß vom Decoder auch nur der ohmsche Wiederstand der Wicklung wirksam, zumindest bis der Motor halbwegs flott dreht und die Gegen-EMK greift. So eine Wicklung hat vielleicht 2-3 Ohm, bei 12V also 4-6A.. Riecht lecker...
Eine Induktivität kann man sich ein bisschen wie ein Schwungrad für Strom vorstellen. Bei niedriger Frequenz der Anschubser bleibt es zwischen den Anschubsern praktisch stehen, man muss viel Kraft (=Strom) aufwenden um es wieder in Gang zu setzen. Je höher die Frequenz der Schubser um so kleiner ist die nötige Kraft (Schwungrad dreht ja noch) und ab einem gewissen Punkt muss man nur noch mit vielen kleinen Schubsern die Reibungsverluste und natürlich die abgenommene Leistung ausgleichen.
Eisenanker-Motor = große Induktivität = Grosses Schwungrad. Kann mit wenigen Schubsern pro Zeit auf Touren gehalten werden
Glockenanker-Motor = sehr kleine Induktivität = ganz kleines Schwungrad = braucht sehr viele Schubser pro Zeit um auf Touren gehalten zu werden. Bei zu niedriger Schubs-Frequenz muß jedes mal von Null neu angeschoben werden = viel Kraft = viel Strom.
Aussen vor bleibt bei dieser Betrachtung die Mechanik, es geht nur um das "elektrische" Schwungrad!!!
Kommt man jetzt auf die Idee einem Glockenankermotor mit höheren Windungszahlen einen höheren ohmschen Widerstand in den Wicklungen zu verpassen um die Ströme zu begrenzen ist das auch Mist. Ohmsche Widerstände sind schädlich weil sie nur Leistung in Abwärme verwandeln! Egal ob an den Übergangswiderständen der Bürsten oder in den Wicklungen. Unsere Eisenbahnmotoren haben besch..ene Wirkungsgrade so zwischen 10-40%. In E-Autos oder bei der Bahn geht unter 80% nix, im optimalen Lastpunkt auch gerne mal jenseits der 95%. Brushless-Modellmotore schaffen auch gerne mal die 90%. Die haben dann ohmsche Wiederstände in den Wicklungen die man mit einem normalen Multimeter schon nicht mehr messen kann (<<1 Ohm).
- Stahlblauberlin
- Metropolitan (MET)
-
Beitr‰ge: 3.522 Registriert am: 07.03.2022 Ort: Berlin Spurweite H0, Z, G Steuerung Roco digital, Z21-Nachbau Stromart DC, Digital, Analog
RE: Entstörung von Motoren bei Digitalisierung
![]() #28 von
SAH
, 04.04.2022 13:34
#28 von
SAH
, 04.04.2022 13:34
Moin @Stahlblauberlin ,
bei den Wirkungsgraden der Modellbahnmotoren sind nur wenige im eingebautem Zustand >15% beim Wirkungsgrad. Bei den klassischen Märklinmotoren irgendwo zwischen 1 undx10%.
Mit freundlichen Grüßen,
Stephan-Alexander Heyn
Stephan-Alexander Heyn
www.sheyn.de/Modellbahn/index.php
RE: Entstörung von Motoren bei Digitalisierung
![]() #29 von
Stahlblauberlin
, 04.04.2022 14:12
#29 von
Stahlblauberlin
, 04.04.2022 14:12
Im eingebauten Zustand sollte man oft nicht mehr von Wirkungsgrad reden. Ein extremes Beispiel dürfte die Rivarossi 96 mit Topfmotor sein, viel aufwändiger kann man ein Getriebe kaum bauen. Zu Märklin halte ich mich mal bedeckt, bin reiner Gleichstromer. Prinzipbedingt muss da der Wirkungsgrad dank Feldwicklung ja noch etwas niedriger sein. Ich beziehe mich auch nur auf den nackten Motor. Für die Mabuchis und Johnsons in neueren Modellen gibt es ja Datenblätter, diese Motoren sind erstaunlich effizient. Richtige Negativbeispiele sind die alten Walzenmotoren von Roco. Vollkommen falsch ausgelegt (Motor zu Modell, nicht der Motor als solcher), wenn man diese Motoren in die Nähe ihres Wirkungsgradmaximums bringen wollte zerreisst es jedes H0-Getriebe.
Bei einem effizienten Antrieb als Gesamtlösung muss alles passen, Getriebe reibungsarm, Motor möglichst dicht ans Wirkungsgradmaximum... Das macht mit Sicherheit kein Modellbahnhersteller.
Die Antriebe müssen da robust und/oder billig sein, zum Teileportfolio und in die Modelle passen.
Aber das ist ein ganz anderes Thema.
- Stahlblauberlin
- Metropolitan (MET)
-
Beitr‰ge: 3.522 Registriert am: 07.03.2022 Ort: Berlin Spurweite H0, Z, G Steuerung Roco digital, Z21-Nachbau Stromart DC, Digital, Analog
RE: Entstörung von Motoren bei Digitalisierung
![]() #30 von
volkerS
, 04.04.2022 18:56
#30 von
volkerS
, 04.04.2022 18:56
Hallo SAH,
deine in #19 beschriebene Entstörung scheint die alte Entstörung, wie sie beim 60901 ...4 Decodern üblich war, zu sein.
Für den mlD3 mit HLA gehören die in #19 genannten Kondensatoren C1, C3 entfernt, zumindest lt. HLA Einbauanleitung.
Volker
Edit: Hier und auch an anderer Stelle wurde/wird von Decodern geschrieben die bereits eine Entstörung onboard haben. Welche Decoder sind das?
- volkerS
- ICE-Sprinter
-
Beitr‰ge: 6.035 Registriert am: 14.10.2014

RE: Entstörung von Motoren bei Digitalisierung
![]() #31 von
SAH
, 04.04.2022 19:10
#31 von
SAH
, 04.04.2022 19:10
Guten Abend @volkerS ,
das von mir benutzte Modell ist im Auslieferungszustand.
Mit freundlichen Grüßen,
Stephan-Alexander Heyn
Stephan-Alexander Heyn
www.sheyn.de/Modellbahn/index.php
RE: Entstörung von Motoren bei Digitalisierung
![]() #32 von
Schwanck
, 04.04.2022 22:10
#32 von
Schwanck
, 04.04.2022 22:10
Moin,
Zitat von volkerS im Beitrag #30
Edit: Hier und auch an anderer Stelle wurde/wird von Decodern geschrieben die bereits eine Entstörung onboard haben. Welche Decoder sind das?
es ist ziemlich sinnlos zu versuchen, eine lange Liste der Decoder zu erstellen, weil es einfacher ist, wenn der Anwender selbst in den Anleitungen der ausgewählten Decoder es nachlesen kann. Schließlich erlaubt das Internet die entsprechenden Seiten der Hersteller vor dem Kauf aufzurufen und einzusehen.
Selbst wenn jemand das Risiko eingeht, gebrauchte Decoder einbauen zu wollen, kann er sich auf diese Weise schlau machen. Außerdem ist der Neuheitenzyklus selbst bei Decodern heute so schnell, dass eine Liste schon veraltet ist, bevor sie überhaupt fertiggestellt werden konnte.
Und es gibt Fachzeitschriften zur Diugitalen Modellbahn (DiMo)
Tschüss
K.F.
- Schwanck
- Trans Europ Express (TEE)
-
Beitr‰ge: 7.962 Registriert am: 22.08.2006 Ort: OWL Spurweite H0, 1 Stromart Digital
RE: Entstörung von Motoren bei Digitalisierung
![]() #33 von
Thinkle
, 04.04.2022 22:18
#33 von
Thinkle
, 04.04.2022 22:18
@SAH Kato kontaktieren gestaltet sich schwieriger als Befürchtet:
https://www.katomodels.com/mail
Die Adresse nennt sich "mail", aber ich sehe da kein @, sondern bloß eine Telefonnummer. Bei dem Nachfolger von Hobbytrain habe ich schonmal nachgefragt, die haben immerhin den interessanten und hilfreichen Rumpfteil der Anleitung, aber der enthält keine Details zur Verschaltung o.ä.
Praktischer Weise abreite ich bei einem japanischen Elektro-Unternehmen, mal schauen, ob sich jemand in Japan finden lässt, der für mich dort anruft und nach dem Entstör-Kondensator fragt.
------------------------------------------
Über Besucher freuen wir uns immer!
http://www.mec-bergheim.de/
RE: Entstörung von Motoren bei Digitalisierung
![]() #34 von
SAH
, 05.04.2022 00:12
#34 von
SAH
, 05.04.2022 00:12
Guten Abend @Stahlblauberlin ,
so wie es aus meiner Sicht aussieht, sind die besten Motoren mit den schlechtesten Getrieben verbunden und umgekehrt. Immerhin kann man aber aus einfachen Daten am Modell den zu erwartenden, maximalen Wirkungsgrad berechnen: Spannung, Anschlusswiderstand des Motors und Stromaufnahme im Leerlauf (egal ob mit oder ohne Getriebe oder Modell berechnen (lassen). Formel, Herleitung und online-Rechner findest Du hier (auch für Reihenschlussmotoren).
Mit freundlichen Grüßen,
Stephan-Alexander Heyn
Stephan-Alexander Heyn
www.sheyn.de/Modellbahn/index.php
RE: Entstörung von Motoren bei Digitalisierung
![]() #35 von
fmm
, 05.04.2022 07:48
#35 von
fmm
, 05.04.2022 07:48
Zitat von Thinkle im Beitrag #33
@SAH Kato kontaktieren gestaltet sich schwieriger als Befürchtet:
https://www.katomodels.com/mail
Die Adresse nennt sich "mail", aber ich sehe da kein @, sondern bloß eine Telefonnummer. Bei dem Nachfolger von Hobbytrain habe ich schonmal nachgefragt, die haben immerhin den interessanten und hilfreichen Rumpfteil der Anleitung, aber der enthält keine Details zur Verschaltung o.ä.
Moin,
hast Du schon mal bei Lemke angefragt? Die sind doch der deutsche Vertrieb für Kato, oder nicht?
https://lemkecollection.de/
Grüße aus dem Norden
Frank
- fmm
- InterRegio (IR)
-
Beitr‰ge: 177 Registriert am: 27.01.2017 Ort: im echten Norden Spurweite H0 Stromart DC
RE: Entstörung von Motoren bei Digitalisierung
![]() #36 von
Stahlblauberlin
, 05.04.2022 11:15
#36 von
Stahlblauberlin
, 05.04.2022 11:15
@Thinkle : Bevor du ewig nach einem Schaltplan suchst ist es vermutlich einfacher vom Motor ausgehend die Leitungen/Leiterbahnen mit dem Multimeter durchzuklingeln. Nach Lehrbuch wird ein Gleichstrommotor mit einem Kondensator zwischen den Anschlüssen und ggf. einer oder zwei Drosseln (Spulen) in den Zuleitungen entstört. Ggf. gibt es noch je einen Kondensator zwischen den Anschlüssen und dem Gehäuse des Motors. Wenn der Motor in einwandfreiem Zustand ist (sauber, Öl/Fett NUR in den Lagern..) würde ich die Entstörbauteile nur anfassen wenn es nötig ist, sprich: die Laufeigenschaften nicht passen (Ruckeln das nicht durch Anpassen der Lastregelparameter in den Griff zu bekommen ist) oder der Decoderhersteller ausdrücklich in der Anleitung darauf hinweist. TAMS z.b. weist sogar darauf hin das ggf. ein Entstörkondensator nachgerüstet werden soll wenn es Störungen gibt!
- Stahlblauberlin
- Metropolitan (MET)
-
Beitr‰ge: 3.522 Registriert am: 07.03.2022 Ort: Berlin Spurweite H0, Z, G Steuerung Roco digital, Z21-Nachbau Stromart DC, Digital, Analog
RE: Entstörung von Motoren bei Digitalisierung
![]() #37 von
tibaum
, 05.04.2022 22:31
#37 von
tibaum
, 05.04.2022 22:31
Hallo SAH,
Zitat von SAH im Beitrag #19
... Zum.Modell: 30390 mit mLD3 und HLA, PWM-Frequenz 40 kHz. Schwingungen bei 1,315 MHz Spitze-Spitze oder Tal-Tal oder mehrere Schwingungen gemessen. Die Messung erfolgte mit den beigefügten Messleitungen zum Fluke 125 Scopemeter. Messspitze mit Krokoklemme, an denen ich Nadel befestigte, die ich in die Bürstenfederhalterungen hängen kann.
Nehme ich den Kondensator weg, werden diese Schwingungen kleiner, setze ich einen 100nF parallel sind die Schwingungen weg. Der Motor ist wie folgt angeschlossen:
Dekoder --Drossel (L1 5muH) -- Motorschild links.
Motorschild links -- C1 (1nF) -- Chassis
Motorschild links -- C2 (1nF) -- Motorschild rechts
Motorschild links -- L2 (Läufer 3,2 mH) -- Motorschild rechts
Motorschild rechts -- C3 (1 nF) -- Chassis
Motorschild rechts -- Drossel (L3 4,7 muH) -- Dekoder
...
Mach doch mal ein Foto von den Schwingungen und von der Motorbeschaltung so das die Bauteile und deren Werte eindeutig identifiziert werden können.
An welchen Anschlüssen hat Du gemessen?
Wie kommen denn die unterschiedlichen Werte von L1 und L3 zustande?
Ich nehme mal an das Du mit muH Mikrohenry meintest und nicht Millimikrohenry. Wer sich ein wenig mit Elektrotechnik beschäftigt der weiß das man wenn der Buchstabe µ nicht im Zeichensatz vorhanden ist dann ersatzweise das u werwendet wird und man nicht mu schreibt.
Gruß
Timo
- tibaum
- InterRegio (IR)
-
Beitr‰ge: 196 Registriert am: 27.11.2011
RE: Entstörung von Motoren bei Digitalisierung
![]() #38 von
SAH
, 06.04.2022 00:54
#38 von
SAH
, 06.04.2022 00:54
Moin @tibaum,
ich schrieb ja, dass ich die Messung an einem anderen Modell wiederholte, also wie in #16 geschrieben an den Motoranschlüssen (= Motorschild links -Motorschild rechts). Der Beschriebene Messaufbau ist auch selbsterklärend. Und aus dem Zusammenhang geht die Bedeutung von "mu" = mikro auch hervor, da brauchst Du nicht auf der Aggrowelle zu reiten, denn eine Nutzung von zwei Dezimalvorsätzen verbietet sich, wenn man sich auskennt.
Mit freundlichen Grüßen,
Stephan-Alexander Heyn
Stephan-Alexander Heyn
www.sheyn.de/Modellbahn/index.php
RE: Entstörung von Motoren bei Digitalisierung
![]() #39 von
tibaum
, 06.04.2022 01:07
#39 von
tibaum
, 06.04.2022 01:07
Hallo SAH,
Zitat von SAH im Beitrag #38
Moin @tibaum,
.. Und aus dem Zusammenhang geht die Bedeutung von "mu" = mikro auch hervor, da brauchst Du nicht auf der Aggrowelle zu reiten, denn eine Nutzung von zwei Dezimalvorsätzen verbietet sich, wenn man sich auskennt.
Richtig, wenn man sich auskennt in der E-Technik dann schreibt man µH oder uH. Aggrowellen gibts hier nicht...
Was ist mit den unterschiedlichen Werten für L1 und L3, wo kommt das her?
Kannst Du ein Foto zur Identifizierung der Bauteile (L und C) liefern?
Gruß
Timo
- tibaum
- InterRegio (IR)
-
Beitr‰ge: 196 Registriert am: 27.11.2011
RE: Entstörung von Motoren bei Digitalisierung
![]() #40 von
BR71
, 06.04.2022 07:35
#40 von
BR71
, 06.04.2022 07:35
Hallo,
man kann hier "des Langen und des Breiten" vortrefflich streiten über für und wider von Entstörbauelementen. Fakt ist, die Funktion des Dekoders stören sie nicht! Modelle (über Ebay ersteigert), welche ohne Entstör-BE bei mir ankamen, habe ich mit solchen nachgerüstet. Bei meinen Modellen hat es kein ... bei alten Modellen von Piko nur sehr geringes, Bürstenfeuer. Es ist halt eine Frage der Pflege und des übermäßigen Gebrauchs von Öl, wenn solches Bürstenfeuer (bis hin zum "Rundfeuer") die Funktion des Dekoders beeinträchtigt. Und das trotz Entstör-BE, ohne diese könnte es den Dekoder zertstören.
Ich kann @Stahlblauberlin (B.36) nur voll zustimmen!
Gruß Claus
- BR71
- InterRegio (IR)
-
Beitr‰ge: 181 Registriert am: 17.07.2015
RE: Entstörung von Motoren bei Digitalisierung
![]() #41 von
Schwanck
, 06.04.2022 09:30
#41 von
Schwanck
, 06.04.2022 09:30
Moin Claus,
das sog. Bürstenfeuer ist bei der Motorbauart der Modellbahnen unvermeidbar. Richtig ist, dass seine Heftigkeit (bis hin zum Rundfeuer) sehr vom Pflegezustand des Kollektors und der Bürsten abhängt. Um diese (Funk)-Störung zu minimieren reicht alleine der kleine Kondensator über den Bürstenanschlüssen. Die Störungen der rein elektrischen Umschaltimpulse des Kollektors werden aber auch über die Verkabelung weiter geleitet und die kann am besten eben auch durch die Drosseln in den Motorzuleitungen möglichst dicht am Motor gedämpft werden. Auch das ist nicht immer ausreichend und dann baut zB Märklin zusätzlich auch in die Zuleitung vom Schleifer zum Decoder eine Drossel (dicke 1 W-Type) ein. Damit wird verhindert, dass sich die Störungen sowohl vom Motor der Lokaus auf die ganze Anlage als auch von den Funken des Mittelleiterschleifers in den eigenen Decoder hin auswirken.
Die ganze Thematik um die Entstörung beschäftigt schon mehr als ein Jahrhundert die Meister und Ingenieure in den elektrotechnischen und elektronischen Fachgebieten.
Tschüss
K.F.
- Schwanck
- Trans Europ Express (TEE)
-
Beitr‰ge: 7.962 Registriert am: 22.08.2006 Ort: OWL Spurweite H0, 1 Stromart Digital
RE: Entstörung von Motoren bei Digitalisierung
![]() #42 von
Stahlblauberlin
, 06.04.2022 10:45
#42 von
Stahlblauberlin
, 06.04.2022 10:45
Was Historisches zu den Drosseln: in sehr alten Katalogen werden diese oft als "UKW"-Entstörung angepriesen, und genau da sind sie wirksam. Sprich: im mehrstelligen MHz-Bereich. Weit weg von allem was Decoder betrifft.
Vielleicht auch noch der rechtliche Rahmen: Der Hersteller einer Lokomotive (1/1-1/220) stellt mit entsprechenden Prüfzeichen (aktuell CE) klar das die Lokomotive den zum Zeitpunkt der Inverkehrbringung geltenden Bestimmungen entspricht. Auch was die Funkentstörung betrifft. Zu Posthörnchen-Zeiten wo noch alles analog Funkte hätte das Herausreißen der Entstörbauteile auch mal Besuch von einem gelben Auto mit vielen Antennen auf dem Dach bedeuten können.
Wenn man das aktuell macht und plant die Lok mal weiter zu verkaufen ist das CE-Zeichen aufgrund der Änderungen erloschen. Bei Lokomotiven mit Schnittstelle und nachgerüstetem Decoder hat der Hersteller das Nachrüsten vorgesehen, damit tangiert es das CE-Zeichen nicht wenn man ansonsten nichts ändert und der Decoder auch ein CE-Zeichen trägt. Bei sonstigen Umbauten ist da Vorsicht geboten, wenn man im Radio hört wo die Lok gerade wie schnell fährt und beim Nachbarn das Garagentor auf- und zugeht ist das ein Problem das auch mal Geld kosten kann. Die Antennen der Messwagen sind heute unauffälliger und die Wagen nicht mehr gelb..
- Stahlblauberlin
- Metropolitan (MET)
-
Beitr‰ge: 3.522 Registriert am: 07.03.2022 Ort: Berlin Spurweite H0, Z, G Steuerung Roco digital, Z21-Nachbau Stromart DC, Digital, Analog
RE: Entstörung von Motoren bei Digitalisierung
![]() #43 von
Heinzi
, 07.04.2022 12:03
#43 von
Heinzi
, 07.04.2022 12:03
Hallo zusammen.
Zitat von Stahlblauberlin im Beitrag #42
Bei Lokomotiven mit Schnittstelle und nachgerüstetem Decoder hat der Hersteller das Nachrüsten vorgesehen, damit tangiert es das CE-Zeichen nicht wenn man ansonsten nichts ändert und der Decoder auch ein CE-Zeichen trägt.
na ja, dass die Theorie in der Praxis nicht immer funktioniert zeigt wohl die PIKO-C4 Problematik eindeutig auf.
Zitat von Stahlblauberlin im Beitrag #42Alle Modellbahner die schon mal Nachbars Garagentor geöffnet oder geschlossen haben, bitte mal die Hand heben. Ebenso jene die schon mal Besuch vom "gelben Wägelchen" (was heute ja nicht mehr gelb sein soll) besuch gehabt haben sollen doch bitte mal von Ihren Erlebnissen berichten.
Bei sonstigen Umbauten ist da Vorsicht geboten, wenn man im Radio hört wo die Lok gerade wie schnell fährt und beim Nachbarn das Garagentor auf- und zugeht ist das ein Problem das auch mal Geld kosten kann.
--> Lasst euch mal nicht verrückt machen. Schaltet einfach das Transistorradio ein und bastelt drauf los.
Ja ich weiss, deine immer wieder zitierten Beispiele vom Radio und Nachbars Garagentor sind ironisch gemeint. Meine Fragen auch.

In diesem Sinne wünsche ich allen einen schönen Tag
Gruss Heinzi
------------------
CS1R / ControlGui
- Heinzi
- Metropolitan (MET)
-
Beitr‰ge: 4.882 Registriert am: 26.04.2006
RE: Entstörung von Motoren bei Digitalisierung
![]() #44 von
firecat76
, 11.04.2022 12:14
#44 von
firecat76
, 11.04.2022 12:14
Hallo zusammen,
ich habe nun weiter versucht für mich Licht ins Dunkel zu bringen. Nachfolgend der Versuch mein aktuelles Verständnis anhand der ESU Decoder v4.x in Worte zu fassen:
Für die Motoransteuerung und damit die Betrachtung der Entstörmittel zw. Dekoder und Motor sind im wesentlichen 2 CVs relevant (ich gehe dabei von fixer Regelfrequenz (Werkseinstellung) in CV 124 aus):
- CV 10 Abtastrate der Lastregelung [Abstand zwischen den EMK-Messungen. Einheit 1.02 ms. Wertebereich 4x - 8x. Ab Werk wird alle 8.19ms der Motor abgeschaltet, um die Dreh-
zahl zu messen.]
- CV 49 Bit 0 (Lastregelung = aktiv/inaktiv) Bit 1 (DC Motor PWM Frequenz = 20 kHz/40 kHz)
Für die weitere Betrachtung gilt es also 2 Fälle zu unterscheiden:
1. Fall: Lastregelung inaktiv (CV49 Bit 0 = Wert 0)
Hier wird der Motor mit der in CV49 Bit 1 gesetzten DC Motor PWM Frequenz (20 kHz/40 kHz) angesteuert.
Dazu dann gleich mal eine Frage an die Experten:
Wird der Motor bei ESU v4 Decodern und ausgeschaltetet Lastregelung über PWM mit Veränderung des Tastgrades angesteuert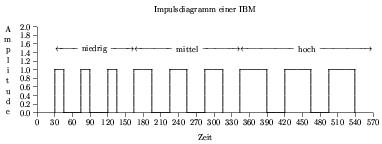
Quelle: Homepage von SAH
oder wird er mittels Impulspaketsteuerung angesteuert?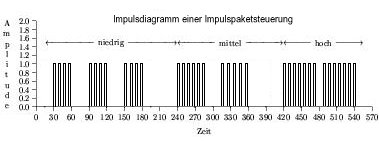
Quelle: Homepage von SAH
Wenn Letzteres was ist dann dabei die überlagerte/äußere Frequenz?
2. Fall: Lastregelung aktiv (CV49 Bit 0 = Wert 1)
Ist die Lastregelung aktiv sind nun zwei Frequenzbereiche im Fokus:
a) die PWM-Frequenz
b) die inverse Dauer der Messpause/Austastlücke. Frequenz = 1/ Zeitspanne bzw. Dauer.
Die Messpause/Austastlücke findet alle X ms statt. Der Wert X wird dabei durch CV 10 im Bereich zw. Wert 4 (alle 4.08 ms) und Wert 8 (alle 8.16 ms (rechnerisch) alle 8.19 ms laut BDA). Über die Länge der Messpause/Austastlücke schweigt sich die ESU BDA bei den v4 Dekodern leider aus [Bei v5 Dekodern ist das einstellbar über die CVs 116-119]. In diesem Beitrag von Klaus_K (RE: C-Digital System ??? (3)) wird die Messpause/Austastlücke mit 2 ms angegeben.
Klaus_K erklärt dann in einem anderen Beitrag weiter:
Zitat von Klaus_K im Beitrag C-Digital System ???
Bei den mir bekannten Dekodern, bekommt der Motor faktisch keine PWM Frequenz von mindestens 20kHz!
Nehmen wir gleich den ESU LokPilpt V4.0 mit der Motor-PWM-Frequenz von 40kHz. Das wäre ja eigentlich passend, aber es gibt ja noch eine Messpause und die ist beim ESU nicht einstellbar und rel. lang im Millisekunden-Bereich.
[...]
Ein Beispiel für den ESU:
CV49 Bit 1 Wert CV 10 Wert 4 (4.08 ms);
40kHz ≙ 25µs; Mess- bzw. Abtastfrequenz: 250Hz ≙ 4ms; Messpause: 2 ms = 2000µs;
_____________________ ≙ Messpause; | | | | | | | | | | | | | | | | | ≙ Motor-PWM mit 40kHz
Was sieht der Motor:
_____________________| | | | | | | | | | | | | | | | | _____________________| | | | | | | | | | | | | | | | |
0----------------------------2----------------------------4----------------------------6----------------------------8->Zeit t [ms]
für die Frequenz folgt
|--------------------------250Hz-------------------------|--------------------------250Hz-------------------------|
Der Motor bekommt also im Prinzip eine PWM mit 250Hz und 50% Tastgrad, falls die Impulsbreite der 40kHz Motor-PWM bei annähernd 100% liegt. Selbst wenn die Messpause nur bei 1ms ist, hätten wir noch 250Hz PWM mit 75% Tastgrad.
Nun aber zum Thema hier: Wie wirken die Entstörmittel dann in diesem Kontext?
Hierfür wurden verschiedene Kenngrößen angesprochen worden:
Zitat von WolleH im Beitrag #2
1. Die Motoransteuerfrequenz. Für die Dimensionierung des C über die Motoranschlüsse ist das nicht ganz unwichtig. Je höher die Frequenz, um so kleiner sollte der C sein.
Aber du hast Recht, bei 10 nF sind auch 40 kHz nicht kritisch. Aber bei 47 nF kommt der kapazitive Widerstand schon in die ungefähre Größenordnung des Motorwiderstands.
2. Die Drosseln: das hängt ja auch von der Frequenz ab. Bei zu hoher Induktivität und hoher Motorfrequenz kommt der Induktive Widerstand auch schon nahe der Größenordnung des Motorwiderstands.
Zitat von SAH im Beitrag #13
Jeder Motor hat eine mechanische Hochlaufzeitkonstante, die z.B. bei Faulhaber in der Datenblättern angegeben wird. Sind nun die elektrischen Impulse länger als diese Konstante, so kann der Motor diesen mechanisch folgen. Das kann ggf. ungünstig sein. Für hochwertige Motoren wie Athlonix werden Zeitkonstanten von bis zu 1-2 ms angegeben. Das entspricht 500 bis 1000 Hz. Eine PWM von 70 Hz wie mit "nomalen Delta" ist da nicht gut. Da ist es besser mindestens eine Größenordnung höher (Faktor 10) also 10 kHz anzusetzen. Dann kann der Motor mechanisch nicht folgen.
Daneben gibt es noch eine elektrische Zeitkonstante, die darauf beruht, dass der Motor aus Spulen (=Induktivitäten) und Widerständen besteht. Diese Zeitkonstante gibt Auskunft darüber, wie schnell dass Läuferfeld auf- bzw. abgebaut wird. Tau(RL) = L/R
Für Märklinmotoren wie dem "SFCM" ist Tau(RL) = 3 mH/7 Ohm = 428 µs. Daraus ergibt sich eine Grenzfrequenz f = R/2*pi*L = 1/2*pi*Tau(RL) = ca. 1 / 0,0027 s = ca. 372 Hz.
Bei Glockenanker BR 50.40 Franco Crosti 37040 gibt es andere Werte: 13 Ohm und 0,26 mH, tau = ca 20 µs bzw. 50 kHz.
Der letzte Punkte betrifft die Wechselwirkung zwischen Läuferspule und dem Entstörkondensator. Diese bilden einen Parallelschwingkreis (R, L und C), dessen Resonanzfrequenz von der Ansteuerung vermieden werden sollte. Man berechnet diese Frequenz nach f = 1 / (2pi x Wurzel (LC)).
L haben wir oben stehen als Beispiele, es fehlt C des Entstörmittels.
Version a aus dem Märklin 6090-Dekoder 1 mikro F, L für den "HLA typisch
3mH. Also f = 2905 Hz also fast 3kHz. Für die 700 Hz der Dekoder PWM uninteressant.
Hierzu nun meine Fragen:
1. Welche Motoransteuerung gilt bei ausgeschalteter Lastregelung? PWM oder Impulspaketsteuerung? Wenn Impulspaketsteuerung, was ist dann dabei die überlagerte/äußere Frequenz?
2. Was genau ist mit Motorwiderstand gemeint und wie berechnet man diesen?
3. Welche Werte für L und R muss man beim Märklin 5 pol. "HLA" ansetzen?
4. Wann wird es kritisch im Sinne der Regelung? Wenn kapazitiver Widerstand = Motorwiderstand und Induktiver Widerstand = Motorwiderstand?
5. Welche Grenzfrequenzen gilt es zu vermeiden? Grenzfrequenz = Innere Frequenz der PWM? Grenzfrequenz = Äußere Frequenz der PWM?
6. Welche Frequenzen sollte man im Bezug auf Resonanzfrequenzen beachten? Innere Frequenz der PWM? Äußere Frequenz der PWM?
Viele Grüße,
Arndt
- firecat76
- RegionalExpress (RE)
-
Beitr‰ge: 77 Registriert am: 01.04.2015 Ort: Rheinhessen Gleise C-Gleis / M-Gleis Spurweite H0 Steuerung CS2, MS2, CU (6021) + 80F Stromart Digital
RE: Entstörung von Motoren bei Digitalisierung
![]() #45 von
Stahlblauberlin
, 11.04.2022 15:56
#45 von
Stahlblauberlin
, 11.04.2022 15:56
Grundsätzlich sollte keine der relevanten Frequenzen (PWM-Frequenz, Messfrequenz, Regelfrequenz) in den Bereich der Resonanzfrequenz des "Motorschwingkreises" fallen, ebenso der ganzzahligen Vielfachen. Letzteres wird allerdings mit zunehmendem Abstand von der Grundfrequenz unkritischer.
Mess- und Regelfrequenz sind getrennt zu betrachten, die Regel"frequenz" ergibt sich aus dem PID-Parametern. Diese sorgen dafür das der komplette Regelkreis eine eigene Resonanzfrequenz hat bei der auch die mechanischen Parameter kräftig mit hineinspielen. Durch die Mechanik dürfte die Resonanzfrequenz deutlich unter der elektrischen Resonanzfrequenz aus Motor und Entstörbauteilen liegen, aber die ganzzahligen Vielfachen, insbesondere die 2. und 4. Oberwelle, können das System kritisch machen.
- Stahlblauberlin
- Metropolitan (MET)
-
Beitr‰ge: 3.522 Registriert am: 07.03.2022 Ort: Berlin Spurweite H0, Z, G Steuerung Roco digital, Z21-Nachbau Stromart DC, Digital, Analog
RE: Entstörung von Motoren bei Digitalisierung
![]() #46 von
Petz1
, 11.04.2022 19:59
#46 von
Petz1
, 11.04.2022 19:59
Zitat von Heinzi im Beitrag #43Ich halte diese Befürchtungen auch für hoffnungslos übertrieben. Als ein meinem ehemaligen Arbeitgeber benachbarter landwirtschaftlicher Betrieb einen Übertragungssendemast zur Steuerung und Registrierung der Samen - und Düngerausbringung auf seinen Feldern bereits vor der Genehmigung illegal in Betrieb nahm, tauchte die Funküberwachung erst dann auf als wir um eine Kontrollmessung ersuchten weil die Funkfernsteuerungen unserer Hallenkräne verrückt spielten...
Ebenso jene die schon mal Besuch vom "gelben Wägelchen" (was heute ja nicht mehr gelb sein soll) besuch gehabt haben sollen doch bitte mal von Ihren Erlebnissen berichten.
--> Lasst euch mal nicht verrückt machen. Schaltet einfach das Transistorradio ein und bastelt drauf los.

Grüße von Markus
Man muß im Leben für seine Erfahrungen bezahlen, wenn man Glück hat bekommt man manchmal Rabatt (Oskar Kokoschka)
- Petz1
- InterCityExpress (ICE)
-
Beitr‰ge: 2.048 Registriert am: 04.12.2020 Ort: Telfs Spurweite H0 Stromart DC, Analog
RE: Entstörung von Motoren bei Digitalisierung
![]() #47 von
SAH
, 11.04.2022 22:31
#47 von
SAH
, 11.04.2022 22:31
Guten Abend @firecat76 (Arndt),
auf die Schnelle kann ich Dir ein paar Fragen beantworten:
Zitat
1. Welche Motoransteuerung gilt bei ausgeschalteter Lastregelung? PWM oder Impulspaketsteuerung? Wenn Impulspaketsteuerung, was ist dann dabei die überlagerte/äußere Frequenz?
2. Was genau ist mit Motorwiderstand gemeint und wie berechnet man diesen?
3. Welche Werte für L und R muss man beim Märklin 5 pol. "HLA" ansetzen?
4. Wann wird es kritisch im Sinne der Regelung? Wenn kapazitiver Widerstand = Motorwiderstand und Induktiver Widerstand = Motorwiderstand?
5. Welche Grenzfrequenzen gilt es zu vermeiden? Grenzfrequenz = Innere Frequenz der PWM? Grenzfrequenz = Äußere Frequenz der PWM?
6. Welche Frequenzen sollte man im Bezug auf Resonanzfrequenzen beachten? Innere Frequenz der PWM? Äußere Frequenz der PWM?
Ad 1. Normalerweise ist die höhere Frequenz bei ausgeschalteter Regelung in Benutzung. Kann je nach Dekoder auch anders sein. Ein Beispiel für Digitalbetrieb mit Äußerer und innere PWM, wie Klaus (siehe Dein Zitat) es beschreibt ist das Modell der BR 18.1 als 3411 von Märklin. "Innere PWM" mit festem Tastgrad 0,55 und 16, ungrad kHz sowie der fahrstufenabhängige "äußere" Tastgrad von 0,933 bei FS 14/14 in 1/16 Schritten runter bis 0,130 bei FS 1/14 und das bei 70 Hz. 
Ad 2. und 3.: dies sind Messwerte an den Motoranschlüssen (Klemmen), wobei alle Kontakte zur Elektronik unterbrochen sind. Übersicht zu Märklinmodellen auf meinen Ankerseiten mit der Bezeichnung "DDCM1/ 386820" im Reiter "Elektromechanische Eigenschaften" nach Motorauswahl.
Ad 4. Für fremderregte Motoren (also mit Permanentmagnetständer) spielt die Frequenz keine Rolle zum Antrieb. Bei Reihen- oder Nebenschlussmotoren spielt die Frequenz des Wechselstromanteils ab f>R/L zum Antrieb keine Rolle mehr, das kann man auch hören. Typischerweise bei ca. 2 kHz für alte Märklinmotoren.
Ad 5. und 6. Resonanzen spielen unter zwei Bedingungen eine Rolle: wenn die Dämpfung klein ist und wenn sie getroffen werden. Ferner ist zwischen Reihenschwingkreis der Entstörelemente, weiter oben beschrieben als L1, C1,2,3 und L3 und Parallelschwingkreis bestehend aus L2 und C1,2,3 zu unterscheiden. Der Reihenschwingkreis wird offensichtlich angeregt, wie das Oszillogramm zeigt. Beim Parallelschwingkreis haben wir Stromüberhöhung bei Resonanz die mit der Güte zusammenhängt. Diese ist jedoch mit den kleinen Kapazitäten zu gering.
Will man auf "Nummer sicher" gehen, sollte man alle Resonanzen vermeiden. Der beste, gangbare Weg ist, sich an die Herstellerangaben des Dekoders bzw. des Modells zu halten.
Mit freundlichen Grüßen,
Stephan-Alexander Heyn
Stephan-Alexander Heyn
www.sheyn.de/Modellbahn/index.php
RE: Entstörung von Motoren bei Digitalisierung
![]() #48 von
firecat76
, 12.04.2022 11:36
#48 von
firecat76
, 12.04.2022 11:36
Hallo @SAH (Stephan-Alexander),
Zitat von SAH im Beitrag #47
Ad 1. Normalerweise ist die höhere Frequenz bei ausgeschalteter Regelung in Benutzung. Kann je nach Dekoder auch anders sein. Ein Beispiel für Digitalbetrieb mit Äußerer und innere PWM, wie Klaus (siehe Dein Zitat) es beschreibt ist das Modell der BR 18.1 als 3411 von Märklin. "Innere PWM" mit festem Tastgrad 0,55 und 16, ungrad kHz sowie der fahrstufenabhängige "äußere" Tastgrad von 0,933 bei FS 14/14 in 1/16 Schritten runter bis 0,130 bei FS 1/14 und das bei 70 Hz.
Das wäre dann nach meinem Verständnis Impulspaketsteuerung mit fester innerer und je nach FS variabler äußerer PWM.
Ist das bei den ESU v4 Decodern auch so oder verändern die bei ausgeschalteter Lastregelung den Tastgrad der (fixen) PWM von 20/40 kHz? Weiß das zufällig jemand bzw. kann es messen?
Zitat von SAH im Beitrag #47
Ad 2. und 3.: dies sind Messwerte an den Motoranschlüssen (Klemmen), wobei alle Kontakte zur Elektronik unterbrochen sind. Übersicht zu Märklinmodellen auf meinen Ankerseiten mit der Bezeichnung "DDCM1/ 386820" im Reiter "Elektromechanische Eigenschaften" nach Motorauswahl.
D.h. du misst einmal den ohmschen Widerstand und einmal den induktiven Widerstand des Ankers? Messklemmen an die Bürstenfedern? Und mit welchem Gerät bestimmst du die Induktivität und bei welchen Parametern?
Zitat von SAH im Beitrag #47
Ad 4. Für fremderregte Motoren (also mit Permanentmagnetständer) spielt die Frequenz keine Rolle zum Antrieb. Bei Reihen- oder Nebenschlussmotoren spielt die Frequenz des Wechselstromanteils ab f>R/L zum Antrieb keine Rolle mehr, das kann man auch hören. Typischerweise bei ca. 2 kHz für alte Märklinmotoren.
Verstanden. Das ist das was mit "mech. folgen" gemeint ist, richtig?
Zitat von SAH im Beitrag #47
Ad 5. und 6. Resonanzen spielen unter zwei Bedingungen eine Rolle: wenn die Dämpfung klein ist und wenn sie getroffen werden. Ferner ist zwischen Reihenschwingkreis der Entstörelemente, weiter oben beschrieben als L1, C1,2,3 und L3 und Parallelschwingkreis bestehend aus L2 und C1,2,3 zu unterscheiden. Der Reihenschwingkreis wird offensichtlich angeregt, wie das Oszillogramm zeigt. Beim Parallelschwingkreis haben wir Stromüberhöhung bei Resonanz die mit der Güte zusammenhängt. Diese ist jedoch mit den kleinen Kapazitäten zu gering.
Will man auf "Nummer sicher" gehen, sollte man alle Resonanzen vermeiden. Der beste, gangbare Weg ist, sich an die Herstellerangaben des Dekoders bzw. des Modells zu halten.
Nun ja, die Herstellerangaben sind nicht immer vorhanden. Insbesondere wenn der Decoder auf einer Schnittstellenplatine sitzt sind ja ggf. Bauteile vorhanden, die der Decoderhersteller so nicht in seine Betrachtung einbezogen hat. ESU bspw. geht in der Anleitung zumeist auf den direkten Motoranschluss (bspw. des HLA) ein. Rüste ich aber nun eine aktuelle Hobby-Lok 36xxx um, sitzt da ja noch die Schnittstellenplatine dazwischen. Und da geht es schon los. Beispielsweise mit den Bauteilwerten der Entstörkondensatoren/-spulen die schon mal unterschiedlich sind zw. original Märklin und Nachrüstplatinen-Bausätzen. Daher ist mir ein Grundverständnis der Materie hier seit langem ein Anliegen. Das Meiste habe ich mir denke ich mittlerweile erarbeitet. Die letzte "fehlende Meile" ist nun die Bauteilewerte der Entstörung im Bezug auf die Motoransteuerung zu setzen und dann zu bewerten ob das kritische Bauteilwerte sind (ggf. dann ersetzen).
Also bspw. R Anker, L Anker, C Entstörung, L Entstörung und Ansteuerfrequenzen bekannt.
Sind C Entstörung und L Entstörung nun kritisch oder nicht. Das wäre was ich mir im Einzelfall gerne selbst ausrechnen würde. Zumindest überschlagsweise.
Beispielrechnung am Beispiel HLA willkomen.

Viele Grüße,
Arndt
- firecat76
- RegionalExpress (RE)
-
Beitr‰ge: 77 Registriert am: 01.04.2015 Ort: Rheinhessen Gleise C-Gleis / M-Gleis Spurweite H0 Steuerung CS2, MS2, CU (6021) + 80F Stromart Digital
RE: Entstörung von Motoren bei Digitalisierung
![]() #49 von
Stahlblauberlin
, 12.04.2022 12:07
#49 von
Stahlblauberlin
, 12.04.2022 12:07
Bvor man anfängt groß zu rechnen ob irgendwelche Bauteile kritisch sind einfach mal ein Erfahrungswert aus ca. 200 digitalisierten Lokomotiven Z-G: Außer Entstörkondensatoren >> 0,1 yF ist mir keine einzige Lokomotive untergekommen bei der ich die Entstörbauteile anfassen musste um gute Fahreigenschaften zu erreichen. Dabei habe ich Decoder aller gängigen Hersteller verbaut, auch angeblich "fürchterliche" wie die von Tams. Spätestens wenn man die Lastregelparameter nach Anleitung angepasst hat (Try&Error-Verfahren..) liefen sogar orginale Lima-Motoren zivil.
Allerdings war bei dem meisten gebraucht erworbenen Maschinen erstmal eine gründliche Putzaktion angesagt, wichtigste Regel bei digitalen Loks ist und bleibt: Vor dem Einbau des Decoders muss das Fahrzeug im Rahmen seiner Möglichkeiten Analog perfekt laufen.
- Stahlblauberlin
- Metropolitan (MET)
-
Beitr‰ge: 3.522 Registriert am: 07.03.2022 Ort: Berlin Spurweite H0, Z, G Steuerung Roco digital, Z21-Nachbau Stromart DC, Digital, Analog
RE: Entstörung von Motoren bei Digitalisierung
![]() #50 von
firecat76
, 12.04.2022 16:35
#50 von
firecat76
, 12.04.2022 16:35
Zitat von Stahlblauberlin im Beitrag #49
Bvor man anfängt groß zu rechnen ob irgendwelche Bauteile kritisch sind einfach mal ein Erfahrungswert aus ca. 200 digitalisierten Lokomotiven Z-G: Außer Entstörkondensatoren >> 0,1 yF ist mir keine einzige Lokomotive untergekommen bei der ich die Entstörbauteile anfassen musste um gute Fahreigenschaften zu erreichen. Dabei habe ich Decoder aller gängigen Hersteller verbaut, auch angeblich "fürchterliche" wie die von Tams. Spätestens wenn man die Lastregelparameter nach Anleitung angepasst hat (Try&Error-Verfahren..) liefen sogar orginale Lima-Motoren zivil.
Allerdings war bei dem meisten gebraucht erworbenen Maschinen erstmal eine gründliche Putzaktion angesagt, wichtigste Regel bei digitalen Loks ist und bleibt: Vor dem Einbau des Decoders muss das Fahrzeug im Rahmen seiner Möglichkeiten Analog perfekt laufen.
Vielen Dank für diesen Erfahrungswert.
Allerdings schrieb ich ja, dass es manchmal den Austausch der Basisplatine bedarf weil bspw. der Decoder nicht gesockelt ist und fest auf der Lokplatine sitzt (Bspw. altere Märklin BR 024 (3624x)). Dann muss man die Entstörung ja wieder aufbauen.
Daher wäre so ein Rechenbeispiel schon ganz nützlich.
Viele Grüße,
Arndt
- firecat76
- RegionalExpress (RE)
-
Beitr‰ge: 77 Registriert am: 01.04.2015 Ort: Rheinhessen Gleise C-Gleis / M-Gleis Spurweite H0 Steuerung CS2, MS2, CU (6021) + 80F Stromart Digital
-
- ƒhnliche Themen
- Antworten
- Zugriffe
- Letzter Beitrag
-
- Problem mit Digitalisierung einer Märklin 3108 BR 44 auf Lokpilot 5 basic mit DCC und JMRI
Erstellt im Forum Digital von Modellbahn-Enthusiast - 16
- 649
- Letzter Beitrag von
Stahlblauberlin

06.05.2024
- Problem mit Digitalisierung einer Märklin 3108 BR 44 auf Lokpilot 5 basic mit DCC und JMRI
-
- Fleischmann 7175 Motor-Fehlfunktion mit D&H PD10MU-3
Erstellt im Forum Digital von tobha-46 - 19
- 488
- Letzter Beitrag von
tobha-46
17.03.2024
- Fleischmann 7175 Motor-Fehlfunktion mit D&H PD10MU-3
-
- Digitalisierung PIKO BR 218 - reine Nervensache
Erstellt im Forum Elektrik und Elektronik von ATISHOP_DE - 4
- 621
- Letzter Beitrag von
ATISHOP_DE
06.01.2024
- Digitalisierung PIKO BR 218 - reine Nervensache
-
- Digitalisierung Rivarossi BR 77...geht nicht gibt's nicht
Erstellt im Forum Digital von Stahlblauberlin - 6
- 622
- Letzter Beitrag von
alexus
19.08.2023
- Digitalisierung Rivarossi BR 77...geht nicht gibt's nicht
-
- Richtige Entstörung alter Märklin Motoren in Digital-Umgebung
Erstellt im Forum Digital von swisstrain - 1
- 430
- Letzter Beitrag von
Schwanck
17.07.2023
- Richtige Entstörung alter Märklin Motoren in Digital-Umgebung
-
- Digitalisierung einer Märklin 3015 - Schweizer Krokodil Ce 6/8
Erstellt im Forum Digital von Tommizwo - 17
- 2017
- Letzter Beitrag von
Brahma
30.01.2024
- Digitalisierung einer Märklin 3015 - Schweizer Krokodil Ce 6/8
-
- Umbau / Digitalisierung Fuggerth M41
Erstellt im Forum Umbauten / Eigenbauten von joergohweh - 0
- 412
- Letzter Beitrag von
joergohweh
09.12.2022
- Umbau / Digitalisierung Fuggerth M41
-
- Digitalisierung einer Lok mit 2 Motoren
Erstellt im Forum Digital von HaMe - 20
- 1596
- Letzter Beitrag von
HXD3D
18.06.2022
- Digitalisierung einer Lok mit 2 Motoren
-
- Digitalisierung Märklin 3184 Am 4/4
Erstellt im Forum Digital von LuciMain - 24
- 1104
- Letzter Beitrag von
Jürgen Flörke
05.06.2022
- Digitalisierung Märklin 3184 Am 4/4
