Hallo Ulrich,
es freut mich, dass Du die Servos jetzt verwenden kannst. Vielen Dank auch von mir an Horst Dieter, dass er Dich mit programmierten ATTinys versorgt hat.
1) Über die „Maximale Dauer der Bewegung“ gestimmt man wie lange das Servo den Befehl zum Ausführen der Bewegung bekommt. Danach wird das Servo abgeschaltet. Die Zeit wird, wenn keine Einheit angegeben ist, in Millisekunden angegeben. Wenn man hier eine Zeit einträgt welche kürzer ist als die Zeit welche der Servo benötigt bis er am Ziel ist, dann bleibt er stehen.
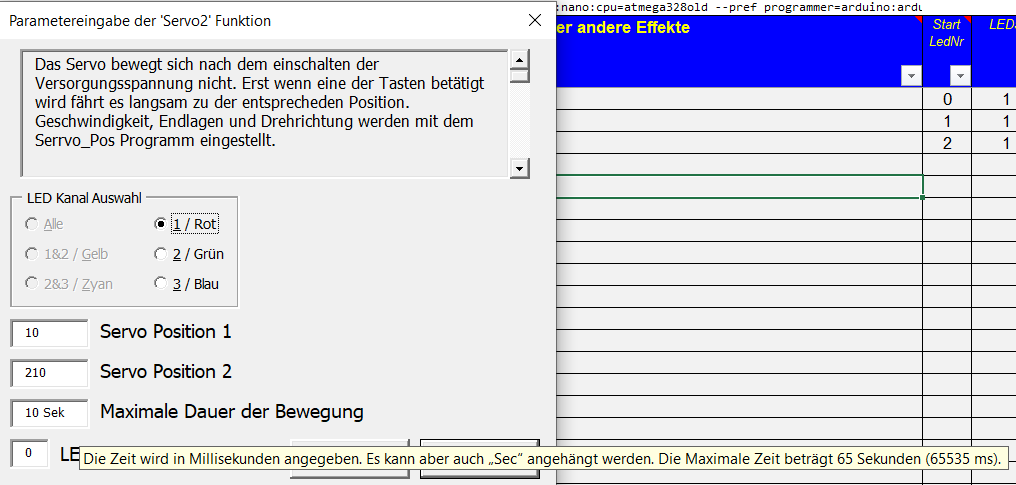
2) Im ersten Schritt wählt man die Adresse das Servos aus. Es soll ja auch möglich sein, dass man eine Servo umkonfiguriert welches irgendwo auf der Anlage verbaut ist. Aber auch am Schreibtisch muss man zunächst mit dem rechten Taster das Servo auswählen da bei den meisten eine Heartbeat LED an der ersten Position steckt. Wenn man das richtige Servo ausgewählt hat dann sollte es einem zuwinken (Wackeln). Dieses wackeln wird erzeugt indem abwechselnd zwei verschiedene Helligkeiten zum Servo geschickt werden. Wenn man anstelle eines Servos eine LED ausgewählt hat, dann wechselt diese ihre Helligkeit. So erkennt man schnell welchen Kanal man gerade ausgewählt hat. Blinkt zunächst die RGB Heartbeat LED dann weiß man, dass das Programm tut was es soll und man muss nur noch den richtigen Kanal auswählen. Das findet man hier im Wiki: https://wiki.mobaledlib.de/anleitungen/s..._ide_definieren
3) Bei beiden Varianten (Arduino „01.Servo_Pos.ino und Farbtest von Harold) werden die Werte am Ende automatisch im EEPROM des ATTiniy abgelegt.
Zitat
3) Mit dem Servo Programm welches im LED Test enthalten ist, kann ich Min und Max einstellen, auch Servo Geschwindigkeit kann ich einstellen,
aber die Einstellung der Geschwindigkeit ändert nichts an der Geschwindigkeit mit der sich das Servo bewegt. Werden die Werte aus dem Servo Programm automatisch beim beenden automatisch übertragen?
Es wundert mich warum das bei Dir nicht geht. Hast Du mal eine ganz langsame Servo Geschwindigkeit eingestellt?
Zitat
4) Auch im Programmgenerator bewirkt eine Änderung der Servo Geschwindigkeit keine Änderung, oder ist das garnicht die Geschwindigkeit mit der der Servo dreht?
Im Programmgenerator definiert man nur die Endpositionen. Solange man nur zwei Positionen verwenden will wählt man hier Werte welche kleiner/größer als die benötigten Positionen sind. Das Programm auf dem Servo Modul sorgt dafür, dass die dort eingestellten Werte nicht überschritten werden. Die Schnittstelle zum Servo ist nur die „Helligkeit“ leider ist diese nicht besonders genau und auch nicht besonders hoch aufgelöst. Bei einer LED merkt man das nicht. Ein Servo ruckelt, wenn es ungenaue Positionsangaben bekommt. Darum ist es am besten, wenn man ihm Werte schickt welche außerhalb des vorher definierten Bereichs liegen.
Die Geschwindigkeit beim verstellen Des Servos sollte aber genau der Geschwindigkeit entsprechen welche man vorher konfiguriert hat.
5) Das kann am falschen Kanal liegen oder daran, dass keine Verbindung zum der Arduino aufgebaut werden konnte.
Hardi


)














 )?
)?



 ).
). 

