
Hallo zusammen,
angeregt durch einige Threads der letzten Wochen habe ich jetzt als DC-Analog-Fahrer einmal meine einzige (arbeitslose) Märklin-Lok genommen und in der bekannten 2-Dioden-Methode auf Gleichstrom-Ansteuerung umgerüstet (kein Bocksprung bei FRU und Erhalt des Auslaufs durch die Feldspule). Dies hatte den Zweck, den Märklin-Reihenschlussmotor auf seine Eigenschaften bei unterschiedlichen Gleichstrom-Ansteuerungen (geglättet, Vollwelle, Halbwelle, „Mischwelle“, Impulsbreitenansteuerung in unterschiedlicher Höhe) anzusehen. Auf meiner Universal „an der Wand lang“-Anlage (hohe Schiene, Mittelleiter) war dies gut machbar. Die Beurteilung erfolgt vorrangig hinsichtlich dem Anfahr- und Langsamfahrverhalten (Mindestgeschwindigkeit).
Unterschiedliche Stromarten bedeutet hier unterschiedliche Fahrpulte bzw. Trafos zur Ansteuerung. Im Folgenden die wesentlichen Ergebnisse mit den unterschiedlichen DC-Ansteuerungen im Originalzustand (ohne Dioden) sowie mit Dioden für den Gleichstrombetrieb. Die Lok wurde zuvor überprüft (Widerstand am gereinigten Trommelkollektor zwischen den Segmenten 3 x ca. 13,2 Ohm; Getriebe leichtgängig; Motorlager geölt).
Die wesentlichen Ergebnisse:
1.) Gleichstrom geglättet:
Die Ansteuerung erfolgte mit dem Fahrpult SB 81004 (eigentlich für Faulhaber-Antriebe gedacht). Wenn man an diesem Regler gaaanz langsam die Spannung hochdreht, bis die zunächst ohne Dioden noch originale Märklin-Lok (hier eine E 04) losfährt und dann ohne Regler-Zurückdrehen die Geschwindigkeit messen will, erhält man von Messung zu Messung extrem unterschiedliche Werte. Eine gute Reproduzierbarkeit ist in keiner Weise gegeben. Der Mittelwert aus vielen Messungen liegt bei fürchterlich hohen 46 km/h (und dass, obwohl die Spannungs-Konstanthaltung diesem Regler sogar hilft; ohne die Konstanthaltung wäre es noch schlimmer). Bezeichnend ist, dass man nach Zurück-Drehen des Reglers einigermaßen vernünftige 13 km/h als Mindestgeschwindigkeit einstellen kann. Die Differenz ist also gravierend.
Nach Einbau der Dioden (zunächst normale Silizium-Dioden mit mindestens 0,7 V Spannungsverlust) muss erwartungsgemäß lediglich der Regler etwas weiter hoch gedreht werden, dann ist alles gleich (nun können mit den Dioden an den Feldspulen also beide Fahrtrichtungen genutzt werden).
2.) Gleichstrom Vollwelle:
Gemeint ist die normale Gleichrichtung einer Sinus-Wechselspannung ohne sonstige Maßnahmen. Dem entsprechen die typischen DC-Trafos der Sechziger wie z. B. ein alter Trix-Express Trafo 5599, der hier verwendet wurde. Die Mindestgeschwindigkeit nach dem langsamen Hochdrehen lag mit einigermaßen akzeptabler Reproduzierbarkeit bei 25 km/h.
Es zeigt sich hiermit bereits, dass für ein vernünftiges Anfahren eine pulsierende Spannung erforderlich ist. Die Spitzenspannung bei Vollwelle liegt immerhin schon um den Faktor 1,41 höher als der effektive Spannungsmittelwert. Einziger Unterschied vor/nach Diodeneinbau: auf der Skalierung geht es nicht mehr „schon“ bei Skalierungswert 4,2 los, sondern bei 4,6 (Anmerkung: diese Trafos waren natürlich nicht für die höheren Spannungen der Märklin-Motoren gebaut, also muss hier relativ weit hoch gedreht werden).
3.) Gleichstrom-Mischwelle:
Ab den 70ern kamen einige unterschiedliche Mischwellen-Trafos auf den Markt, die in den Katalogen und sonstigen Bezeichnungen etwas missverständlich als Halbwellen-Trafos bezeichnet wurden. Gemeint war aber nur das Anfahren; dass nämlich beim Anfahren mit niedriger Spannung von den beiden durch den Gleichrichter gleich gepolten Wellen nur 1 genutzt wurde. Hierdurch entsteht also eine Spannungslücke über 10 ms (bei 50 Hz), welche bei angenommen gleich hoch eingestellter Spannungsspitze (der Welle) die mittlere Spannung halbiert. Der Gedanke: die Lok fängt bei gleicher Spitzenspannung mit Bewegung an, fährt nach dem Anfahren bei unveränderter Reglerstellung dann aber viel langsamer weiter.
Der Clou war dann, dass bei weiter aufgedrehtem Regler (und schnellerer Lok) vor allem die zunächst fehlende Welle immer weiter aufgebaut wird, bis irgendwann beide Wellen gleich hoch liegen. Dieses „Irgendwann“ lag bei verschiedenen Herstellern sehr unterschiedlich und führt zu entsprechend unterschiedlichen Ergebnissen. Bei einem Trix-Trafo 5503 wird bereits sehr früh der Punkt erreicht, bei dem beide Wellen gleich hoch liegen (ab Ueff = 4,7 V; zu niedrig für einen Effekt bei Märklin-Motoren). Ab dann liegt also in der Praxis ein Vollwellen-Trafo vor, der von diesem Kriterium her dann zu gleichen Ergebnissen führt wie der alte Trix 5599 mit seiner Vollwelle von vorneherein.
Die notwendigen Spannungen am Märklin-Reihenschlussmotor liegen also so hoch, dass der Trix 5503 bereits in Vollwelle ist. Betrachten wir ihn oder ähnliche Fahrpulte mit zu niedriger Schwelle der Wellen-Gleichstellung also nicht weiter.
Ein Titan 816 liefert auch bei höherem Ueff immer noch Mischwelle (möglich, da auch die stärkere Welle mit Regler-Hochdrehen etwas ansteigt; somit kein Plateau der stärkeren Welle wie am Trix 5503) mit dem Ergebnis, dass wir nun an der originalen E 04 eine Mindestgeschwindigkeit von 14 km/h sehen (Regler langsam hochgedreht) bzw. 11 km/h (Regler zurück gedreht).
Was passiert nun nach dem Dioden-Einbau?
Es gibt eine Verschiebung der Mischwelle bzw. des Pulsationsfaktors (Uspitze/Ueff), da nun aufgrund des Dioden-Spannungsabfalls weiter aufgedreht werden muss, bis es losgeht. Denn die Spitzenspannung steigt mit dem Hochdrehen prozentual weniger an als die mittlere Spannung. Ergebnis: die Spannungspulsation sinkt und damit steigt leider die erreichbare Mindestgeschwindigkeit beim langsamen Regler-Hochdrehen. Den ganz genauen Unterschied über viele Messungen zu ermitteln habe ich mir erspart, denn das nächste Fahrpult zeigt den Effekt einer Pulsationsfaktor-Verschiebung viel besser. Festzuhalten bleibt aber am Titan 816 noch, dass man auch ohne Dioden sehr unkomfortabel bis ungefähr zur Hälfte des Reglerbereiches hochdrehen muss, bis es losgeht (er ist eben mit seinem niedrigen Start-Ueff eigentlich nicht für Märklin-Motoren gedacht).
4.) „Mischpulsation“:
Ein Fahrpult MRC Tech 4 (260) zeigt im untersten Bereich eine Spitzenspannung noch unter 9,9 V, um dann ab Ueff = ca. 3 V in einem sehr weiten Bereich mit 9,9 V (Spitze) konstant zu bleiben (ein Plateau); bis ab 9,9 V vollständig geglättete Spannung vorliegt. „Irgendwo“ in einem Bereich, in dem die Spitzenspannung also bei den 9,9 V liegt, fährt die Testlok an.
Die Mindestgeschwindigkeit der originalen Lok (ohne Dioden): 9 km/h zu 7 km/h. Das ist also das bisher beste Ergebnis.
Auch hier wieder der Einbau der Dioden. Nun kommt es zu einer klaren Verschlechterung. Nicht nur, dass die Lok erst bei Skalierung 25 (von 100) statt zuvor bei 20 anfährt; das wäre erträglich, sondern es kommt zu einem drastischen Anstieg der Mindestgeschwindigkeit ohne Zurückdrehen des Reglers auf 17 km/h (statt den 9 km/h vor Umbau). Ich habe daraufhin den Spannungsverlust an der Diode 1N4001 gemessen: 0,9 V (eigentlich hätte ich 0,7 V bis 0,8 V erwartet). Nachmessung mit 2. Gerät liefert das Gleiche. Auch die Pulsationsspitze ist von 9,9 V auf 9,0 V gesunken. Ein Nachsehen im Datenblatt der Diode zeigt aber ebenfalls, dass mein gemessener Spannungsverlust realistisch ist. Der Pulsationsfaktor (Spitzenspannung zu mittlerer Spannung) ist also gesunken mit diesem Ergebnis der doch deutlichst erhöhten Mindestgeschwindigkeit.
Nun wurden Schottky-Dioden statt der Silizium-Diode eingebaut. Der Spannungsverlust liegt bei 0,35 V statt zuvor 0,9 V. Die Mindestgeschwindigkeit liegt nun irgendwo zwischen 10 und 13 km/h (eine ganz genaue Ermittlung wäre extrem zeitaufwendig und war aufgrund der Eindeutigkeit des Ergebnisses auch nicht mehr nötig).
Nun muss man allerdings leider sagen, dass dieses relativ gute Ergebnis einer solo laufenden Lok bei hohen Zuglasten für dieses Fahrpult dann nicht mehr gilt. Muss man mit steigender Last zum Anfahren immer weiter hoch drehen, dann kommt man mit diesem MRC-Fahrpult immer mehr in Richtung geglätteter Gleichstrom, und dann passiert in der Tendenz genau das, was wir zuvor mit niedrigen Pulsationsfaktoren schon gesehen haben: schlechteres Anfahren (hängt aber sicher auch von Motortoleranzen ab). Das wird natürlich verstärkt durch die „Einrastneigung“ des 3-Pol-Motorankers, allerdings kenne ich das so ausgeprägt von meinen Hamo-Loks mit Dauermagnet nicht.
5.) Vollpulsation:
Verwendet wurde das Impulsbreiten-Steuergerät Roco ASC 1000 (auf Wechselstrom-Schalterstellung für abgeschaltete Lastregelung).
Was zu erwarten war: die hohen Impulsspitzen (mindestens 17 V) ermöglichen die Mindestgeschwindigkeit von ca. 8 km/h (kein Unterschied mit Regler-Zurückdrehen). Nochmals besser also als am MRC-Fahrpult.
Vor allem ist auch mit hoher Zuglast ein sehr langsames Anfahren möglich, anders als am MRC. Insgesamt fällt aber auch bei solo laufender Lok auf, dass es „Vorzugsgeschwindigkeiten“ gibt, bei denen es offenbar einen Einrast-Effekt des 3-Pol-Motors gibt. Das bedeutet, eine Geschwindigkeitssteigerung bis auf mittlere Geschwindigkeiten erfolgt nicht ganz harmonisch. Wie schon bekannt, hat diese Steuerungsart mit hohen Impulsspitzen auch den Nachteil des deutlich hörbaren Motor-Brummens bzw. Nagelns.
6.) Halbwelle „pur“:
Mit einem gekappten Gleichrichter (Einweg-Gleichrichtung) erhält man in ALLEN Reglerstellungen die reine Halbwelle, also immer 10 ms Spannungspause. Dies ist ein eher theoretischer Versuch, denn solche Regler wurden eher gar nicht angeboten (vielleicht ist das aber bei dem einen oder anderen Fahrpult der „Rangiergang“).
Ich habe eine gute Mindestgeschwindigkeit von 7 km/h ermittelt (kein Unterschied mit Regler-Zurückdrehen). Im Rahmen von Toleranzen für Nachmessungen gibt sich das eigentlich kaum etwas zu den Angaben zuvor mit 8 oder 9 km/h. Werden hier gegenüber der originalen Lok die Dioden eingebaut, erhöht sich in diesem Fall erwartungsgemäß nur die Reglerstellung, ab der es los geht.
Fazit: ein Umbau auf DC mit den Dioden ist zwar einfach möglich, es sollten aber Schottky-Dioden (SR240) verwendet werden. Leider gibt es für einen so umgerüsteten Märklin-Motor nicht DAS Fahrpult; jedenfalls kein Großserien-Gerät. Unschön ist bei Verwendung eines gängigen DC-Fahrpultes das weite Hochdrehen am Regler bis zum Anfahren, denn diese wurden natürlich nicht für die höhere Betriebsspannung des Märklin-Reihenschlussmotors spezialisiert.
Ein Heisswolf SFR 2000 hat keine Lastregelung, was mich bei anderen Motoren stören würde, aber hier am Reihenschlussmotor würde eine Lastregelung natürlich sowieso nicht ohne Weiteres funktionieren. Alle anderen angepriesenen Eigenschaften des Reglers könnten hier aber nach meiner Einschätzung gut helfen; speziell beim Anfahren mit hohen Zuglasten (Anfahrspannung einstellbar, Impulsspitzen einstellbar, Frequenz mit der Reglerstellung mitgeführt einstellbar, Ueff-Spannungskonstanthaltung angeblich vorhanden).
Wäre ich Märklin-Fahrer, würde ich das immerhin mal versuchen. Ich habe allerdings noch nie von dieser Kombination gelesen.
Sofern ein Original Märklin-Fahrpult weiterverwendet werden soll (und nicht mit hohen Impulsspitzen des Electronic 6600 gefahren werden soll), wäre außer einem Umpolschalter natürlich ein Gleichrichter erforderlich. Wer die Lok-Umrüstung macht, kann sowieso löten. Dann bietet es sich an, von Vollwelle ein klein wenig in Richtung Mischwelle mit mehr Pulsation zu gehen, indem der Gleichrichter „asymmetrisch“ zusammen gelötet wird. In einer Stromrichtung mit 2 ZUSÄTZLICHEN Silizium-Dioden, in der anderen werden Schottky-Dioden (nicht zusätzlich) verwendet. Der Gesamtspannungs-Verlust eines solchen „Gleichrichters“ würde praktisch den handelsüblichen Gleichrichtern entsprechen (Sprachgebrauch: 1,4 V).
Das wäre also das Gegenteil von einem Glätten, aber alle obigen Ergebnisse zeigten, dass mehr Pulsation für gescheites Anfahren äußerst nützlich ist. Und es gilt wieder: Versuch macht kluch.
Viele Grüße
Uwe
 Stummis Modellbahnforum
Stummis Modellbahnforumwww.stummiforum.de
Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
![]() #1 von
42555
, 09.06.2024 18:50
#1 von
42555
, 09.06.2024 18:50
- 42555
- Regionalbahn (RB)
-
Beiträge: 35 Registriert am: 16.04.2024 Spurweite H0 Stromart DC, Analog

RE: Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
Guten Abend Uwe,
vielen Dank für Deine ausführlichen Tests mit Märklinmotoren an verschiedenen DC-Spannungsquellen. Es bestätigt einige meiner Beobachtungen!
Für mich interessant: Schottky-Dioden anstelle "normaler" Dioden (wenn möglich in SMD-Version, damit könnte der LRA+ profitieren.
Zu Deinen Beobachtungen möchte ich noch einiges aus meinem Fundus hinzufügen:
Anfahrproblem mit den Trommelkollektormodellen: je nach Betriebszustand von extrem schlecht bis gut.
Die T8 (89.0) als 3104 mit Trommelkollektormotor fährt im kalten Zustand mit geglättetem DC (aus einem Netzteil Hameg HM8143) in etwa so "an":
Wird das Getriebe ein wenig geölt, dann verbessert sich das Ganze:
Ist das Modell in betriebswarmen Zustand, dann ist die Anfahrt deutlich besser:
Was aus den Modellen heraus geholt werden kann, kann man bei folgendem Versuch sehen:
eine BR 86 mit Scheibenkollektormotor mit eingestellter Digitaladresse. Der Dekoder hat keine Systemerkennung und behandelt den Analogbetrieb entsprechend mit AC, das nach Gleichritung mit PWM überlagert wird. Leider ist das Modell außer für diese Demonstration nicht für den Analogbetrieb geeignet.
Mit AC fahren gut gewartete Loks mit Scheibenkollektor recht gut an, wie am Beispiel der TM800/3004 (BR 80):
Die Möglichkeit zum Herunterregeln, wenn das Fahrzeug fährt ist jedoch bei allen Modellen mit Reihenschlussmotor gegeben. Unter Verwendung des "analogen Rangiergangs" bis zur Unkenntlichkeit.
Eine Anmerkung zu PWM: die von Dir genannte langsame Anfahrt gelingt nur bei niedrigen PWM-Frequenzen. Bei der von mir zum Test benutzten Frequenz von 6,63 kHz reagieren die Motoren wie auf DC.
mit freundlichen Grüßen,
Stephan-Alexander Heyn
Stephan-Alexander Heyn
www.sheyn.de/Modellbahn/index.php
RE: Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
![]() #3 von
42555
, 09.06.2024 21:04
#3 von
42555
, 09.06.2024 21:04
Hallo @SAH Stephan-Alexander,
klar, bei mehreren KHz gilt das nicht mehr. Da hat man durch die Induktivität ja so gut wie geglättete Spannung.
Ich meine gelesen zu haben, dass das Heisswolf-Gerät bis auf sehr wenige hundert Hz einstellbar ist (300 oder 400 Hz; beginnend ab 50 Hz oder so ungefähr). Also noch volle „Rüttel-Frequenz“, was hier ja gewünscht ist.
Das letzte Video mit der TM800 scheint nicht zu passen (die Lok fährt nicht an). Verwechslung oder habe ich Tomaten auf den Augen?
Viele Grüße
Uwe
- 42555
- Regionalbahn (RB)
-
Beiträge: 35 Registriert am: 16.04.2024 Spurweite H0 Stromart DC, Analog
RE: Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
Guten Abend @42555 (Uwe),
die TM800 fährt ein kurzes Stück an, leider bleibt in dieser Fahrtrichtung bei so wenig Schwung das Modell gerne stehen (Weichen).
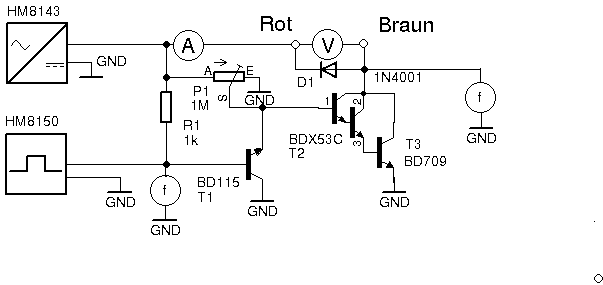
In Bezug auf das Fahrgeräusch mit PWM habe ich auch mal experimentiert und eine Lok (BR 111) mit PWM variabler Frequenz, fester Tastgrad gespeist.
Das Ergebnis habe ich mit Timestamps versehen:
Die Verzerrungen bei hohen Frequenzen muss ich noch beseitigen.
Das Schaltbild für die PWM:
mit freundlichen Grüßen,
Stephan-Alexander Heyn
Stephan-Alexander Heyn
www.sheyn.de/Modellbahn/index.php
RE: Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
![]() #5 von
Petz1
, 09.06.2024 23:34
#5 von
Petz1
, 09.06.2024 23:34
Hallo Uwe !
Find Deine Testberichte einfach erstklassig !!!
Als Ergänzung würd ich versuchsweise den Märklinmotor mit Dioden auch mal in Parallel-, anstatt Reihenschaltung von Anker und Feldspule testen.
Die dann deutlich höhere Stromaufnahme sollte aber in Verbindung mit der dann Nebenschlußcharakteristik des Motors zu besseren Etrgebnissen führen.
Allerdings bei längeren Testfahrten die Stotorwicklungstemperatur checken weil sie die im Nebenschlußbetrieb deutlich stärker erwärmt; Ankerwicklung ist hingegen unkritisch weil für die im Nebenschluß die Stromaufnahme jener eines Hamomodells mit Permamagnet entspricht.
Es ab auch schon ein dementsprechende Beiträge eines Kollegen in einem Topic - find ich leider nur nicht mehr...
Grüße von Markus
Man muß im Leben für seine Erfahrungen bezahlen, wenn man Glück hat bekommt man manchmal Rabatt (Oskar Kokoschka)
- Petz1
- InterCityExpress (ICE)
-
Beiträge: 2.111 Registriert am: 04.12.2020 Ort: Telfs Spurweite H0 Stromart DC, Analog
RE: Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
![]() #6 von
42555
, 10.06.2024 21:59
#6 von
42555
, 10.06.2024 21:59
Guten Abend,
vielen Dank für das Interesse und die Antworten.
@Petz1 Markus,
bei am Motorschild abgelöteten Feldspulen (sind ja 2 Teile) messe ich Widerstände von 5,1 Ohm und 6,6 Ohm (erstaunlich hohe Differenz) für die Spulen.
Würde ich jetzt eine Feldspule parallel zum Motoranker schalten, also als Nebenschlussmotor, hätte ich bei angenommen 15 V selbst für die höher liegende 6,6 Ohm-Spule eine Stromstärke von ca. 2,3 A. Das ergäbe dann eine Wärmebelastung von 34,5 W (theoretisch, denn die gängigen Trafos würden in die Knie gehen). Das geht also nicht. Auch Theorie: bei hoher Spannung würde mit dem dann extrem hohen Magnetfeld die Leerlaufdrehzahl wohl doch zu weit zurück gehen (wegen um ein Mehrfaches höherer Gegeninduktion des Motorankers).
Das Problem eines Nebenschlussmotors wäre in diesem Fall also die stark variable Spannung an der Feldspule.
Ich habe mal nur versuchsweise etwas anderes probiert: die abgelöteten Anschlüsse der Feldspule habe ich an eine separate Stromversorgung angeschlossen (die 6,6 Ohm-Spule), in diesem Fall einfach an den alten Trix-Trafo. Damit kann ich das Magnetfeld über den Betriebsbereich des Motors konstant halten, indem ich eine bestimmte (sehr niedrige) Spannung anlege und dann so belasse.
Als vergleichende Rechnung: Wenn der originale Reihenschlussmotor bis sagen wir 6 V noch gerade nicht anfährt, gilt bis dahin der Blockier-Strom mit 6 / (Ankerwiderstand 13,2 + Feldspulenwiderstand 6,6) = 0,30 A.
Nun habe ich also erst einmal am umgefriemelten Nebenschlussmotor diese 0,3 A als Festwert eingestellt (Beaufschlagung mit 6,6 Ohm x 0,3 A = 2 V).
Ergebnis: natürlich fährt die Lok nun bei niedrigeren Trafo-Spannungen an, denn der Motoranker hat ja nun nicht mehr den Vorwiderstand 6,6 Ohm der Spule. Aber das ist klar, wir interessieren uns stattdessen für die Anfahrstärke mit Zuglast und generell der Mindestgeschwindigkeit auch einer solo laufenden Lok (Langsamfahrfähigkeit). Und daran hat sich tatsächlich auch nichts Nennenswertes verändert.
Halte ich die langsam laufende Lok mit der Hand fest, spürt man ganz deutlich, dass in den Einrast-Stellungen des 3-Pol-Motorankers überhaupt keine Reserven vorliegen.
Ich kürze es jetzt ab: erhöht man die Stromstärke in der Feldspule, dann verbessert sich das Ganze erwartungsgemäß ganz deutlich. Es müssen mindestens 0,4 A; eher 0,5 A sein (entsprechend 3,3 V an der Feldspule). Es ist erstaunlich, aber dann ist es nicht nur „besser“, sondern man „erfährt“ eine andere Welt.
Die E 04 fährt damit auch mit erheblicher Zuglast (ca. 40 p) so langsam mit dem Trafo Trix 5503 an, dass ein Regler-Zurückdrehen nichts mehr bringt, und die gemessene Mindestgeschwindigkeit liegt bei 5,5 km/h. Diese Mindestgeschwindigkeit liegt mit Zuglast als auch solo laufender Lok gleich. Also ein Wert, der im Originalzustand analog unerreichbar ist. Vor allem ist diese gute Eigenschaft permanent so reproduzierbar. Die Höchstgeschwindigkeit bei 12 oder 16 V ist auch in dieser Konstellation weit, weit jenseits 170 km/h (ich konnte es wegen provisorischem Aufbau nicht ganz genau messen).
Und was haben wir jetzt von dem Versuch?
Erst einmal nichts! Reine Theorie. Außer es wollte jemand seine Elloks so umrüsten, dass über die Oberleitung die Feldspule separat konstant gespeist wird; dann aber nur mit Batteriebahn-Trafo oder so etwas, damit die Feldspule (und das Kunststoffgehäuse) nicht versehentlich verheizt wird. Mit 3,3 V und 0,5 A wäre die Wärmebelastung an der Spule dagegen durchaus noch vertretbar (1,65 W).
Eine Überlegung als Ergebnis bleibt aber doch: reicht denn eigentlich der handelsübliche Hamo-Dauermagnet in seiner Magnetstärke aus, falls man doch die Dioden-Methode und den guten Auslauf verlassen will?
Und was ist mit den superstarken sogenannten Neodym-Magneten? Der Versuch hat immerhin gezeigt, dass das Magnetfeld möglichst sehr hoch gemacht werden sollte; man erhält dann einen „neuen“ Motor.
Viele Grüße
Uwe
- 42555
- Regionalbahn (RB)
-
Beiträge: 35 Registriert am: 16.04.2024 Spurweite H0 Stromart DC, Analog
RE: Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
Guten Abend @42555 (Uwe),
Die Anschlusswiderstände der Feldmagnetspulen sind fast immer so unterschiedlich. Dafür sind die Induktivitäten näher zusammen.
Die "Trockenrechnung" (sorry für den Ausdruck) zur Stromaufnahme des Feldmagneten im Nebenschluss berücksichtigt nicht den erheblichen Einfluss der Ankerrückwirkung wenn die ganze Chose mal läuft. Solange das Modell ordentlich läuft, ist der Feldmagnetstrom deutlich kleiner als nach dieser "Trockenrechnung". Aber Wehe die Drehzahl geht runter, dann geht dieser Strom hoch.
Das Ganze habe ich mal.qualitativ mit einer E44 (3011) ausprobiert. Nach Langsamfahrt wirds richtig warm!
Mit freundlichen Grüßen,
Stephan-Alexander Heyn
Stephan-Alexander Heyn
www.sheyn.de/Modellbahn/index.php
RE: Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
![]() #8 von
Petz1
, 11.06.2024 01:52
#8 von
Petz1
, 11.06.2024 01:52
Ich hab leider zuerst nicht geckeckt das das von mir erwähnte Topic im FAM läuft. Dort hat ein Kollege recht ausführliche Versuche mit der Nebenschlußschaltung seiner Märklins gemacht und kommt nicht auf jene Ströme die Uwe hier theoretisch ermittelte:
https://www.altemodellbahnen.de/t78267f2....html#msg696082
Grüße von Markus
Man muß im Leben für seine Erfahrungen bezahlen, wenn man Glück hat bekommt man manchmal Rabatt (Oskar Kokoschka)
- Petz1
- InterCityExpress (ICE)
-
Beiträge: 2.111 Registriert am: 04.12.2020 Ort: Telfs Spurweite H0 Stromart DC, Analog
RE: Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
Guten Morgen @Petz1 (Markus),
Dein Link ist nur für diejenigen nutzbar, die auch im FAM angemeldet sind.
Zum Umbau (3049) folgende Abschätzungen:
Original mit DCM1. Läuferwiderstand 13,3 Ohm, Ständerwiderstand vorwärts 5,6 Ohm (Daten meiner 3049 aus den Loktests). Leerlaufstromaufnahme des Motors bei 12V 140 mA.
Der Läufer hat damit, falls direkt an 12V angeschlossen eine Umlaufspannung von (U_k -RI) 12V - 13,3Ohm*0,14A = 10,1V
Diese Spannung benötigen wir, weil im Nebenschlussmotor in gewisser Weise auch wie ein Transformator funktioniert: Läufer erzeugt GegenSpannung, die in den Ständer induziert wird. Übersetzungsverhältnis abgeschätzt 400 Windungen (Ständer) : 600 Windungen (1,5*Windungen pro Läuferspule für Dreipoler).
Für den Ständer erhält man dann 10,1V * (2/3) = ca. 6,6V Gegenspannung. Es verbleiben ca. 5,4V, was rechnerisch 5,4V / 5,6Ohm = ca. 1A ergibt.
Will man die tatsächlichen Verhältnisse betrachten, bleibt nur ein Rollenprüfstand, ein Oszilloskop und einen Shunt jewils in Reihe zu Feldmagnet und zum Läufer.
Das wird ggf. aufwändig.
mit freundlichen Grüßen,
Stephan-Alexander Heyn
Stephan-Alexander Heyn
www.sheyn.de/Modellbahn/index.php
RE: Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
![]() #10 von
Petz1
, 11.06.2024 10:41
#10 von
Petz1
, 11.06.2024 10:41
Hallo Stephan-Alexander !
Merci für Deine Erläuterungen. Ich hab Versuche bis dato nur mit dem Baukastenmotor 1321 (der vernmutlich einem LFCM entspricht) und einem ausgeschiedenen Hagantrieb gemacht weil meine Hamos bereits Permamagnete besitzen.
Interessant wäre für mich ein Nebenschlußumbau deshalb, weil meiner Meinung nach die SFCM-, und DCM´s (auch die Hamo-, und HLA - Ausführungen) allesamt zuwenig Drehmoment für einen praktikablen DC - Analogbetrieb aufweisen denn alle meiner Ansicht nach ausreichend dimensionierten Permamotore verfuttern bis an die 2A Blockadestrom.
Der 1321 spielte bis dato bei meinen Versuchen thermisch noch mit, der Hag mutiert hingegen zum "Würstelbrater" und wird sich sicher irgendwann mit einer Miefrauchwolke vertschüssen wobei ich ihm dann sicher keine Träne nachweine.
Grüße von Markus
Man muß im Leben für seine Erfahrungen bezahlen, wenn man Glück hat bekommt man manchmal Rabatt (Oskar Kokoschka)
- Petz1
- InterCityExpress (ICE)
-
Beiträge: 2.111 Registriert am: 04.12.2020 Ort: Telfs Spurweite H0 Stromart DC, Analog
RE: Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
![]() #11 von
Stahlblauberlin
, 11.06.2024 14:31
#11 von
Stahlblauberlin
, 11.06.2024 14:31
Nach eigenen Erfahrungen ist der diodisierte Allstrommotor am besten mit niedrig getakteter PWM (50-60Hz) plus "Anfahrkick" zu fahren. Unter Anfahrkick verstehe ich eine längeren ersten PWM-Puls mit ca. 30-50 ms der das Losbrechmoment überwindet. Ein ganz frühes meiner PWM-Fahrpulte hatte das quasi als Abfallprodukt der Schaltung, damit ließen sich eher grobe Motoren wie Märklin (Hamo oder diodisierte) oder Rivarossi-Topfmotoren sehr gut anfahren. Bei Fleischmann-Motoren war der aber schon zu viel, die ruckten schon. Bei älteren Tams-Dekodern konnte man den auch einstellen.
Der Umbau auf Nebenschluss ist eher sinnfrei, der Stromverbrauch geht durch die Decke und der Wirkungsgrad endgültig in den Keller. Dann gleich Umbauen auf Feldmagnet.
Die Teilwickungen der Feldspule müssen übrigens unterschiedliche Gleichstromwiderstände haben: die zuerst gewickelte Teilspule ist halt innen, gleiche Windungszahl aber kleinerer Durchmesser=kürzerer Draht als die darüber gewickelte zweite Hälfte. Da die Windungszahl für die Feldstärke und Impedanz deutlich entscheidender als der ohmsche Widerstand ist macht das Sinn.
- Stahlblauberlin
- Metropolitan (MET)
-
Beiträge: 3.895 Registriert am: 07.03.2022 Ort: Berlin Spurweite H0, Z, G Steuerung Roco digital, Z21-Nachbau Stromart DC, Digital, Analog

RE: Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
![]() #12 von
Lokpaint
, 11.06.2024 16:30
#12 von
Lokpaint
, 11.06.2024 16:30
Zitat von Stahlblauberlin im Beitrag #11
Der Umbau auf Nebenschluss ist eher sinnfrei, der Stromverbrauch geht durch die Decke und der Wirkungsgrad endgültig in den Keller.
Trotzdem; Das ist genau was die 7180 Elektronik macht. Hierbei werden die beiden Spulen aber in Reihe geschaltet.
Bart
- Lokpaint
- Metropolitan (MET)
-
Beiträge: 3.189 Registriert am: 10.11.2006 Ort: Vlaardingen NL Gleise M-Gleise 3600 Spurweite H0 Steuerung Analog, IB. CS2 Stromart Digital, Analog
RE: Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
![]() #13 von
SAH
, 11.06.2024 16:48
#13 von
SAH
, 11.06.2024 16:48
Moin @Lokpaint (Bart),
die 7180-Elektronik macht weder Nebenschluss noch zusammenschalten der Ständerspulen.
Mit freundlichen Grüßen,
Stephan-Alexander Heyn
Stephan-Alexander Heyn
www.sheyn.de/Modellbahn/index.php
RE: Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
![]() #14 von
42555
, 11.06.2024 21:02
#14 von
42555
, 11.06.2024 21:02
Guten Abend,
Zitat von Stephan-Alexander:
Zitat
Aber Wehe die Drehzahl geht runter, dann geht dieser Strom hoch.
An der Feldspule wurden bei STEHENDER Lok die 0,5 A eingestellt (mit 3,3 V Fremdversorgung). Durch Ankerrückwirkung würden bei laufender Lok und den festen 3,3 V an der Feldspule die 1,65 W immer unkritisch bleiben. Wobei es hier die Rückwirkung nicht gibt; siehe unten.
Die Lok wird bei mir „an der langen Leine“ geführt mit einer dünnen Doppellitze (Aktionsradius so ca. +/- 2m) am Stator für die Versorgung; mit gebastelter Zugentlastung für den dünnen Spulendraht. Es wird mit 2 Messgeräten gleichzeitig Spannung und Stromstärke überwacht. Für kurze Zeit kann ich den Stromwert bei Höchstgeschwindigkeit ablesen: unverändert 0,5 A (mit den überwachten 3,3 V) an der Spule.
Zitat von Stephan-Alexander (@SAH):
Zitat
…..weil im Nebenschlussmotor in gewisser Weise auch wie ein Transformator funktioniert: Läufer erzeugt GegenSpannung, die in den Ständer induziert wird.
Alles klar, die Betonung liegt bei Dir auf Nebenschlussmotor. Ich hatte schon beschrieben, dass mein Versuchsaufbau ein fremderregter Motor ist. O.K.; an einer Stelle habe ich trotzdem die hierfür nicht korrekte Bezeichnung Nebenschlussmotor verwendet. Asche auf mein Haupt.
Für den fremderregten Motor schreibst Du aber selbst schon im FAM #20: „ Keine Ankerrückwirkung auf Ständerfeld“.
Zitat von Markus: (@Petz1)
Zitat
…..und kommt nicht auf jene Ströme die Uwe hier theoretisch ermittelte
So sehr groß sind die Unterschiede auch wieder nicht, aber im dortigen Nebenschluss-Prinzip spielt nun also die Anker-Rückwirkung eine Rolle. Im FAM # 33 gibt Axel an, dass er bei 8 V ca. 0,9 A Spulenstrom hat. Ich hatte eine Rechnung für 15 V ohne Anker-Rückwirkung gemacht (2,3 A), auf die 8 V herunter gerechnet sind das 1,22 A. Die Axel-Spule ist nicht serienmäßig (mehr Windungen) und hat auch von daher etwas weniger Stromaufnahme bei bestimmter Spannung.
Jetzt Umgelötet auf einen Nebenschlussmotor (ich habe die 6,6 Ohm-Spule genommen) erreiche ich folgende Werte:
Mindestgeschwindigkeit: 11 km/h (Trix Trafo (5503)
Geschwindigkeit bei 8 V: 71 km/h
Höchstgeschwindigkeit bei 12 V: 101 km/h.
Die Gesamt-Stromstärke bei der Höchstgeschwindigkeit 12 V liegt bei 1,35 A (anfangs) bis 1,10 A nach kurzer Zeit (die Spule bekommt aufgrund der Hitze einen steigenden Widerstand). Bei 8 V bei ca. 0,9 A.
Der reine Spulenstrom liegt also bei der (deutlich zu niedrigen) Höchstgeschwindigkeit immer irgendwo annähernd 1 A; macht eine Wärmebelastung von grob gerechnet 10 W. Nach ein paar Runden hat es im Raum gemüffelt  , das Kunststoff-Lokgehäuse habe ich vorsichtshalber weggelassen.
, das Kunststoff-Lokgehäuse habe ich vorsichtshalber weggelassen.
Mehr als die 101 km/h sind mit einem gängigen DC-Trafo nicht drin, da die 12 V das herausholbare Maximum bei über 1 A waren. Das würde ich der Spule aber auch nicht zumuten.
Das Nebenschlussprinzip bietet auch kein wirklich hohes Magnetfeld beim Anfahren mit niedriger Spannung. Ein Spulenstrom 0,4 A oder 0,5 A ist damit natürlich nicht möglich (gemessen beim Anfahren mit den 11 km/h: 0,32 A). Die 5,5 km/h FREMDERREGT waren nur durch Spulenstrom > 0,45 A erreichbar. Damit kroch die Lok mit einem Ueff am Gleis von 1,9 V (=Ankerspannung). Lasse ich die Schienenspannung 1,9 V stehen und drehe nur den Spulenstrom herunter auf 0,30 A, bleibt die Lok stehen. Anschließendes Hochdrehen der Schienenspannung (bei unverändert niedrigem 0,30 A Spulenstrom) zeigt wieder die schon vom Reihenschlussmotor bekannten Anfahrprobleme.
Wie schon gesagt, alles reine Theorie-Versuche. Aber ich sehe immerhin, dass mit einem konstanten Magnetfeld entsprechend 0,5 A (fremderregt) eine super Regelbarkeit von 5,5 km/h bis > 170 km/h gegeben wäre.
Für das Nebenschluss-Prinzip gilt das so nicht, dazu kommt noch verdammt viel Hitze.
Viele Grüße
Uwe
- 42555
- Regionalbahn (RB)
-
Beiträge: 35 Registriert am: 16.04.2024 Spurweite H0 Stromart DC, Analog
RE: Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
![]() #15 von
Petz1
, 11.06.2024 22:25
#15 von
Petz1
, 11.06.2024 22:25
Hallo Uwe !
Bei Deinen Beobachtungen sehe ich das sich Stromverbrauch und Vmax in direkter Nebenschlußschaltung in einem für mich sehr stimmigen Bereich bewegen; dies auch deshalb weil die Vmax auf meiner Anlage nur etwa maßstabsbezogene 60 Km/h beträgt die manche, auf einen großen 24 V Fünfpolbühler umgerüstete Loks bei 16 V DC gerade noch erreichen.
Und zumindest meine Tests mit dem "Müffel - Hag" und dem Baukastenmotor zeigen eindeutige Verbesserungen zu jener Laufcharakteristik die ich bevorzuge. Stromverbrauch eines Lokconsists wär auch nicht das Thema denn dann könnt ich immer noch das 120 W 9950er MRC ans Gleis hängen.
Außerdem stünde auch noch ein, mit zwei parallelgeschalteten Conrad Drehzahlstellern ausgerüstetes 18V 20A Eigenbaufahrpult bereit und auch wenn sich jetzt einige mit Grausen abwenden ist das mein H0 - "Kurzschlußdetektor" sprich einfach anhängen und beobachten wo es zu rauchen oder glühen beginnt...
Grüße von Markus
Man muß im Leben für seine Erfahrungen bezahlen, wenn man Glück hat bekommt man manchmal Rabatt (Oskar Kokoschka)
- Petz1
- InterCityExpress (ICE)
-
Beiträge: 2.111 Registriert am: 04.12.2020 Ort: Telfs Spurweite H0 Stromart DC, Analog
RE: Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
![]() #16 von
SAH
, 12.06.2024 13:54
#16 von
SAH
, 12.06.2024 13:54
Hallo @42555 (Uwe),
mir ist da auch ein gedanklicher Fehler passiert: das mit Ankerrückwirung bei FEM bezog ich mich auf Permanentmagnete als Ständer. Sorry, für das Durcheinander!
Deine Ergebnisse sprechen für sich.
Noch etwas: meine NSM-Versuche habe ich mit AC durchgeführt, weil ich zu diesem Zeitpunkt das Netzteil noch nicht hatte. Mit AC gibts noch mehr Störeffekte. Sobald der Prüfungsstreß bei mir vorbei ist, versuche ich, ein paar "Trockenübungen" mit Messungen durchzuführen.
mit freundlichen Grüßen,
Stephan-Alexander Heyn
Stephan-Alexander Heyn
www.sheyn.de/Modellbahn/index.php
RE: Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
![]() #17 von
Stahlblauberlin
, 12.06.2024 14:06
#17 von
Stahlblauberlin
, 12.06.2024 14:06
Zitat von 42555 im Beitrag #14
Aber ich sehe immerhin, dass mit einem konstanten Magnetfeld entsprechend 0,5 A (fremderregt) eine super Regelbarkeit von 5,5 km/h bis > 170 km/h gegeben wäre.
Das lässt sich auch hervorragend mit einem Permanentmagnet anstelle der Feldspule erreichen, und das bei null W Energieverbrauch für das Statorfeld. Allerdings sind z.B. die originalem HAMO-Magnete etwas schwach auf der Brust, ein mit aktuellen Magneten vom großen A.. (5x3x2, zwei nebeneinander) in den Kern einer Feldpule anstelle der Wicklung sind stärker und verbessern die Fahreigenschaften deutlich. So hab ich meinem Hamo-Krokodil Manieren beigebracht.
- Stahlblauberlin
- Metropolitan (MET)
-
Beiträge: 3.895 Registriert am: 07.03.2022 Ort: Berlin Spurweite H0, Z, G Steuerung Roco digital, Z21-Nachbau Stromart DC, Digital, Analog
RE: Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
![]() #18 von
K.Wagner
, 12.06.2024 16:48
#18 von
K.Wagner
, 12.06.2024 16:48
Hi,
danke für den Thread - der für mich allerdings eher "historisch" ist. Ich bin "damals" - als es noch keine Digitaltechnik etc. gab, von der Phasenabschnittssteuerung direkt auf die Impulsbreitensteuerung gegangen. Frequent war nach meiner Erinnerung etwas mehr als 100 Hz. Dioden hatte ich wenig zur Auswahl, aber es waren "normale" Dioden, die in etwa der 4000-er Reihe entsprachen - nur mit weniger Bauraum. Flußspannung ca. 0,5 V bei Leerlauf, bei Vollast 0,8 V - soweit ich mich erinnern kann.
Spitzenspannung der Impulse waren 18V.
Meine Loks sind mit ca. 5 km/h losgefahren - richtig gut waren die Maschinen, deren Anker ich mit Blei ausgefüllt habe - z.B. die 86 (3096) und die 260 (3064).
Dazu hatte ich dann noch eine NF - Dauerzugbeleuchtung mit ca. 14 kHz.....
Die Märklin C80 waren übrigens erstmal ein kleiner Rückschritt für die Loks. Aber hier haben die Vorteile des Digtalbetriebs überwogen. Später mit den Uhlenbrocks hatten die Loks dann wieder die gewohnten Fahreigenschaften - sogar etwas niedrigere Mindestgeschwindigkeiten. Inzwischen habe ich keine Feldmagnete mehr im Einsatz - nur bei "historischen" Loks, die ich nicht umbauen will (3003, 3021, 3047 und den Schienenbus....)
Gruß Klaus
- K.Wagner
- Metropolitan (MET)
-
Beiträge: 4.655 Registriert am: 24.01.2006 Ort: Im Norden Badens Gleise Märklin K und Märklin C Spurweite H0, G Steuerung Intellibox 1 Stromart Digital

RE: Märklinmotor mit Dioden für DC: Einfluss „Stromarten“ bei DC-Betrieb
![]() #19 von
Petz1
, 12.06.2024 20:45
#19 von
Petz1
, 12.06.2024 20:45
Hallo Klaus !
Wenn es außer dem Roco ASC1000 Analogfahrpulte mit einer, der Decodermotoransteuerung vergleichbaren Impulsbreitensteuerung und Zusatzbremstastenfunktion gäbe wär die ganze Nebenschlußschaltungsproblematik für mich obsolet.
Nachdem ich aber deshalb an die MRC´s gebunden bin, besteht nur die Möglichkeit den (auch mit Permamagnet oder HLA) für mich eindeutig zu schwachbrüstigen Märklinmotoren so mal Beine zu machen. Und wenn ne Statorwicklung abrauchen sollte kann ich sie ja immer noch neu und dann gleich verstärkt wickeln...
Grüße von Markus
Man muß im Leben für seine Erfahrungen bezahlen, wenn man Glück hat bekommt man manchmal Rabatt (Oskar Kokoschka)
- Petz1
- InterCityExpress (ICE)
-
Beiträge: 2.111 Registriert am: 04.12.2020 Ort: Telfs Spurweite H0 Stromart DC, Analog
-
- Ähnliche Themen
- Antworten
- Zugriffe
- Letzter Beitrag
-
- Vom Nichtleiter zum Halbleiter - neue Diode für die Roco BR 151
Erstellt im Forum Elektrik und Elektronik von ATISHOP_DE - 7
- 594
- Letzter Beitrag von
ATISHOP_DE

13.11.2023
- Vom Nichtleiter zum Halbleiter - neue Diode für die Roco BR 151
-
- Dioden-Problem
Erstellt im Forum Elektrik und Elektronik von Tremonia - 10
- 905
- Letzter Beitrag von
HGD
13.09.2022
- Dioden-Problem
-
- Anschluss Signale mit Leucht-Dioden (Hobbysignale) direkt an 16 Volt - Wie?
Erstellt im Forum Elektrik und Elektronik von - 4
- 1301
- Letzter Beitrag von
basteljero
05.12.2020
- Anschluss Signale mit Leucht-Dioden (Hobbysignale) direkt an 16 Volt - Wie?
-
- Dimensionierung Dioden für Belegtmelder
Erstellt im Forum Elektrik und Elektronik von - 8
- 2366
- Letzter Beitrag von
oligluck
03.01.2020
- Dimensionierung Dioden für Belegtmelder
-
- Frage:Wie kann ich verschiedene "Stromarten" sauber trennen?
Erstellt im Forum Elektrik und Elektronik von - 5
- 2959
- Letzter Beitrag von
JoWild
30.10.2019
- Frage:Wie kann ich verschiedene "Stromarten" sauber trennen?
-
- Diode welche Stärke
Erstellt im Forum Elektrik und Elektronik von - 11
- 2506
- Letzter Beitrag von
manni 51
27.11.2018
- Diode welche Stärke
-
- Dioden für Lichtwechsel
Erstellt im Forum Schmalspurbahn, Feldbahn von - 10
- 3472
- Letzter Beitrag von
ThomasR
22.12.2014
- Dioden für Lichtwechsel
-
- S0: Hochrüstung einer E69 Pola-Maxi auf digitalen Betrieb
Erstellt im Forum Große Spuren (Spur 0, 1, G) und Gartenbahn von - 5
- 2576
- Letzter Beitrag von
rollo
21.04.2014
- S0: Hochrüstung einer E69 Pola-Maxi auf digitalen Betrieb
