
Hallo Sarah!
Egal wie alt man wird, man lernt eben nie aus.
Danke für den Hinweis, allerdings funktioniert die Verlinkung von meinem PC aus.
Schöne Grüße an alle
 Stummis Modellbahnforum
Stummis Modellbahnforumwww.stummiforum.de
RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5851 von
Erich-N-Bahner
, 29.04.2021 00:10
#5851 von
Erich-N-Bahner
, 29.04.2021 00:10
- Erich-N-Bahner
-
Beiträge: 5 Registriert am: 28.02.2020 Spurweite N Steuerung Z21 Stromart DC, Digital

RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5852 von
Saryk
, 29.04.2021 01:14
#5852 von
Saryk
, 29.04.2021 01:14
Ich hab ja auch nur gesagt, dass das einbinden als sichtbares Video so nicht funktioniert, da Vimeo eine Video-Hosting Website, ähnlich Youtube, ist. Für Privat gehostete Videos müsste Ralf (Stummi) / Achim (Murrphy) einen anderen Tag 'installieren', der den html5 'standart' player als Forums validen 'BBcode' zur verfügung stellt. BBcode sind die tollen [] Befehle, die es erlauben, html Funktionen zu nutzen, ohne bösartigen Code zu erlauben. html findet man normalerweise zwischen <> wieder. (Drückt mal STRG+i, dann seht ihr dass das Forum nichts anderes als eine Tabelle ist)
Früher hat man sowas teilweise sehr mühsam von Hand schreiben müssen und die ersten 'Bulletin Boards' stammen noch aus der Zeit der 'Newsgroups'. - da habe ich noch nicht einmal gelebt. Heute wird so eine Tabelle dynamisch generiert und existiert eigentlich gar nicht. Die Website die ihr hier seht wird extra für euch aus PHP-Code geparst, heißt, eine Maschine sucht die teile zusammen die sie braucht um euch eine valide Website schicken zu können - udn vergist sie in genau dem Moment, wo ihr auf einen Link klickt. Daher war das mit der Datenbank letztens auch so katastrophal. Da in der SQL (Structured Query Language) - Datenbank wirklich alles abgelegt wird, worauf die php-Dateien zugreifen wollen.
Angefangen von wer man ist (User, UserAuth[Password], Postcount, Avatar, etc) zu welchen 'Thread' (thread-id, post-id's die zur thread-id gehören) bis hin zum Aussehen der eigentlichen Website für den User (Einstellungen ob man Avatare sehen möchte, ob die Wintereffekt an sein dürfen etc), wird das alles in den Tabellen der SQL abgelegt.
Und Gott bin ich gerade wieder off-topic geworden. Aber vielleicht hilfts ja, zu verstehen was php+sql+javascript heute so eigentlich alles möglich macht - 
grüße,
Sarah
Meine Ideenkiste
Ohne-Glied im Marzibahnerklub
Planung | Von Sayn und Sarthaal | Bauthread

RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5853 von
BJS-1952
, 29.04.2021 05:52
#5853 von
BJS-1952
, 29.04.2021 05:52
Hallo Erich
ich hatte auch den Bericht mit dem Mini Schrittmotor hier gelesen und war so begeistert, dass ich mir gleich 10 Stück links und 10 Stück rechts bei Ali bestellt habe. Obwohl ich sie bezahlt habe sind sie nie angekommen. Auch auf mehrere Reklamationen wurde nie geantwortet.
Wie ich mittlerweile festgestellt habe gibt es sie auch nicht mehr bei Ali. Kannst du mir verraten wo du sie bestellt hast.
Danke und viele Grüße
Bernd
- BJS-1952
- RegionalExpress (RE)
-
Beiträge: 62 Registriert am: 16.12.2018 Ort: Kernen i.R. Spurweite H0 Stromart Digital
RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5854 von
Erich-N-Bahner
, 29.04.2021 07:41
#5854 von
Erich-N-Bahner
, 29.04.2021 07:41
Hallo Bernd!
Diese Motoren hat Walter (aus dem Verein) im letzten Jahr bestellt. Selbst wenn er noch weiß wo, wird dir das wohl kaum helfen.
Leider kann ich dir auch nicht sagen, welche Anbieter seriös sind und welche nicht. Ich denke, wenn man auf Nummer sicher gehen will, dann muss man wohl höhere Preise akzeptieren und bei einem Anbieter in Deutschland bestellen - oder hat jemand anderer aus dem Forum zu diesem Problem einen guten Tipp?
Schöne Grüße
Erich
- Erich-N-Bahner
-
Beiträge: 5 Registriert am: 28.02.2020 Spurweite N Steuerung Z21 Stromart DC, Digital
RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5855 von
Moba_Nicki
, 29.04.2021 08:50
#5855 von
Moba_Nicki
, 29.04.2021 08:50
Zitat
Hallo Bernd!
Diese Motoren hat Walter (aus dem Verein) im letzten Jahr bestellt. Selbst wenn er noch weiß wo, wird dir das wohl kaum helfen.
Leider kann ich dir auch nicht sagen, welche Anbieter seriös sind und welche nicht. Ich denke, wenn man auf Nummer sicher gehen will, dann muss man wohl höhere Preise akzeptieren und bei einem Anbieter in Deutschland bestellen - oder hat jemand anderer aus dem Forum zu diesem Problem einen guten Tipp?
Schöne Grüße
Erich
Hallo Erich und Bernd
dieser Verkäufer bei Ali hat mich bislang noch nie im Stick gelassen.
Den Link habe ich als ich den 3D-Druck-Sockel für sein Signal erstellt hatte, letztes Jahr von Hardi bekommen
https://de.aliexpress.com/item/4000648920302.html
Schöne Grüße
Dominik
Alle Infos zur MobaLedLib findet ihr hier: https://wiki.mobaledlib.de/
- Moba_Nicki
- EuroCity (EC)
-
Beiträge: 1.310 Registriert am: 28.01.2020 Gleise M, Z Spurweite H0, Z Stromart AC, DC, Analog

RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5856 von
Erich-N-Bahner
, 29.04.2021 09:31
#5856 von
Erich-N-Bahner
, 29.04.2021 09:31
Vielen Dank Dominik!
Ich habe mir gerade diese Händlerseite angesehen. Neben dem längeren Schrittmotor hat dieser auch den "gefalteten" Motor relativ günstig im Angebot https://de.aliexpress.com/item/400076131...8%2315618%23927
Dazu bin ich dort auf einen alternativen Motortreiber (statt des A498 gestoßen, der pinkompatibel ist, aber bis zu 1 / 128 die Schritte verkleinern/verlangsamen kann https://de.aliexpress.com/item/400120493...8%2315615%23695
gestoßen, der pinkompatibel ist, aber bis zu 1 / 128 die Schritte verkleinern/verlangsamen kann https://de.aliexpress.com/item/400120493...8%2315615%23695
Vielleicht ist dies ja auch eine brauchbare Quelle, wo man alles gleichzeitig relativ preiswert bekommen kann.
- Erich-N-Bahner
-
Beiträge: 5 Registriert am: 28.02.2020 Spurweite N Steuerung Z21 Stromart DC, Digital
RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5857 von
PeterVT11
, 29.04.2021 10:38
#5857 von
PeterVT11
, 29.04.2021 10:38
Hallo,
zuerst vielen Dank für die vielen Infos gestern Abend beim Stammtisch.
Ich wollte mein MLL auf Version 3 hochrüsten, bekomme aber nur die 2.1.3M wieder installiert (Über Optionen/Update/Aktualisiere Bibliothek).
Muss ich das anders machen 0der von Github holen?
Peter
- PeterVT11
- InterRegio (IR)
-
Beiträge: 132 Registriert am: 19.03.2021 Gleise Märklin C-Gleis Spurweite H0 Steuerung Märklin CS3, Win-Digipet Stromart AC, Digital, Analog
RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5858 von
Hardi
, 29.04.2021 11:19
#5858 von
Hardi
, 29.04.2021 11:19
Hallo Peter,
komisch, die Version 2.1.3 existiert nicht mehr.
=> Das bedeutet, dass die Installation bei Dir nicht richtig ausgeführt wird ;-(
Manchmal kommt es vor, dass die bestehende Installation einer Bibliothek nicht gelöscht werden kann weil irgend ein Programm Dateien in dem Verzeichnis geöffnet hat. Dann wird die neue Version in ein temporäres Verzeichnis installiert wo sie nicht genutzt werden kann. Schau mal nach ob in dem Verzeichnis
"c:user<Name>Arduinolibraries" ein komisches Unterverzeichnis angelegt wurde. Wenn dieses die MobaLedLib Sourcen enthält (srcmobaledLib.h), dann kannst Du das Verzeichnis löschen.
Starte die Installation dann nochmal neu nachdem Du alle anderen Programme geschlossen hast. Evtl. must Du Windows von der Installation schließen damit nicht irgend welche alten Prozesse auf das Verzeichnis zugreifen.
Hardi
Haltet Euch unbedingt von diesen Seiten fern:
viewtopic.php?f=7&t=165060
https://wiki.mobaledlib.de/
sonst wird Eure Anlage niemals fertig…
Unsere Anlage findet Ihr hier:
RE: Unsere Kinder und Vater Anlage(n)

RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5859 von
harald-k
, 29.04.2021 13:23
#5859 von
harald-k
, 29.04.2021 13:23
Hallo,
Kann ich mit der MLL über einen Taster am Anlagenrand einen DCC-Befehl auslösen?
Vielen Dank im Voraus für eine gute Idee.
Harald
- harald-k
- InterRegio (IR)
-
Beiträge: 179 Registriert am: 06.12.2019 Ort: Westerstede Spurweite N Stromart Digital

RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5860 von
Moba_Nicki
, 29.04.2021 14:03
#5860 von
Moba_Nicki
, 29.04.2021 14:03
Zitat
Hallo,
Kann ich mit der MLL über einen Taster am Anlagenrand einen DCC-Befehl auslösen?
Vielen Dank im Voraus für eine gute Idee.
Harald
Hallo Harald
mit den PushButtons ist es nicht möglich einen DCC-Befehl zu senden.
Die Hauptplatine kann nur Daten empfangen, aber nicht versenden auf dem DCC-Bus.
Schöne Grüße
Dominik
Alle Infos zur MobaLedLib findet ihr hier: https://wiki.mobaledlib.de/
- Moba_Nicki
- EuroCity (EC)
-
Beiträge: 1.310 Registriert am: 28.01.2020 Gleise M, Z Spurweite H0, Z Stromart AC, DC, Analog
RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5861 von
aftpriv
, 29.04.2021 18:40
#5861 von
aftpriv
, 29.04.2021 18:40
Hallo MLL-er und alle, die es noch werden wollen
Ihr könnt die ESP32-Platinen jetzt vorbestellen, Lieferung erfolgt ca. Mitte Mai, und zwar:
110a-ESP32-Adapterplatine, nur Platine, unbestückt € 3,50 / Stück
110b-ESP32-Adapterplatine, Platine & IDC-Stecker, unbestückt € 10,60 / Stück (1x Platine, 15x IDC-Stecker+Buchsen-6P, 2x IDC-Stecker+Buchsen-10P) von 8 auf 10 korrigiert
Gruß Alf
PS: derzeit sind auch ca 300-LED-Treiber WS2811D DIP-8 IC´s ab Lager lieferbar
601a-LED-Treiber (001 St) WS2811D DIP-8 € 0,45 / Stück
601b-LED-Treiber (010 St) WS2811D DIP-8 € 3,50 / 10 Stück
. Bild WS2811D DIP-8: https://www.newegg.com/p/0SW-00AB-00079
Pickel-Bahner seit 1958 / K-Gleis + ZIMO-Decoder (MX633P22/MX645P22)
RocRail & RocNetNode jeweils auf RasPi
Email bezüglich MobaLedLib-Belange: LedLib@yahoo.com
- aftpriv
- EuroCity (EC)
-
Beiträge: 1.279 Registriert am: 03.04.2012 Ort: MKK, Hessischer Spessart Gleise K-Gleis und Selbsbau-Pickel-Gleis (DC-Gleis mit Mittelleiter ausrüsten) Spurweite H0 Steuerung Rocrail + Rocnetnode auf Raspi Stromart Digital
RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5862 von
Moba_Nicki
, 29.04.2021 18:45
#5862 von
Moba_Nicki
, 29.04.2021 18:45
Zitat
Hallo MLL-er und alle, die es noch werden wollen
Ihr könnt die ESP32-Platinen jetzt vorbestellen, Lieferung erfolgt ca. Mitte Mai, und zwar:
110a-ESP32-Adapterplatine, nur Platine, unbestückt € 3,50 / Stück
110b-ESP32-Adapterplatine, Platine & IDC-Stecker, unbestückt € 10,60 / Stück (1x Platine, 15x IDC-Stecker+Buchsen-6P, 2x IDC-Stecker+Buchsen-8P)
Gruß Alf
...
Hallo Alf
vielen Dank.
Es müssten aber zwei 10-polige IDC-Stecker und Buchsen sein. 
Schöne Grüße
Dominik
Alle Infos zur MobaLedLib findet ihr hier: https://wiki.mobaledlib.de/
- Moba_Nicki
- EuroCity (EC)
-
Beiträge: 1.310 Registriert am: 28.01.2020 Gleise M, Z Spurweite H0, Z Stromart AC, DC, Analog
RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5863 von
aftpriv
, 29.04.2021 18:53
#5863 von
aftpriv
, 29.04.2021 18:53
Danke Dominik.
war ein Tippfehler, in meiner Datenbank waren es schon immer 2x 10P
Gruß Alf
Pickel-Bahner seit 1958 / K-Gleis + ZIMO-Decoder (MX633P22/MX645P22)
RocRail & RocNetNode jeweils auf RasPi
Email bezüglich MobaLedLib-Belange: LedLib@yahoo.com
- aftpriv
- EuroCity (EC)
-
Beiträge: 1.279 Registriert am: 03.04.2012 Ort: MKK, Hessischer Spessart Gleise K-Gleis und Selbsbau-Pickel-Gleis (DC-Gleis mit Mittelleiter ausrüsten) Spurweite H0 Steuerung Rocrail + Rocnetnode auf Raspi Stromart Digital
RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5864 von
aftpriv
, 29.04.2021 18:59
#5864 von
aftpriv
, 29.04.2021 18:59
An alle Vorbesteller,
bitte schickt derzeit kein Geld.
Sobald die Platinen lieferbar sind, bekommt Ihr von mir ein Angebot, dann bitte erst bezahlen!
Gruß Alf
Pickel-Bahner seit 1958 / K-Gleis + ZIMO-Decoder (MX633P22/MX645P22)
RocRail & RocNetNode jeweils auf RasPi
Email bezüglich MobaLedLib-Belange: LedLib@yahoo.com
- aftpriv
- EuroCity (EC)
-
Beiträge: 1.279 Registriert am: 03.04.2012 Ort: MKK, Hessischer Spessart Gleise K-Gleis und Selbsbau-Pickel-Gleis (DC-Gleis mit Mittelleiter ausrüsten) Spurweite H0 Steuerung Rocrail + Rocnetnode auf Raspi Stromart Digital
RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5865 von
TMaa
, 29.04.2021 21:15
#5865 von
TMaa
, 29.04.2021 21:15
Hallo Stammtisch Teilnemer,
Ich dachte eine Weile über die Frage nach, die Hardi gestern Abend gestellt hatte: Wie lenke ich den Steppenmotor in die gewünschte Position? ... Zeit?
Sie kennen die Frequenz = Anzahl der Impulse + Anzahl der Schritte pro Umdrehung = Position? Oder ist das zu kurzsichtig? 
Theo.
Damals: Estorf (Nienburg/Weser) entlang der Strecke Nienburg–Minden (Natobahn)
- TMaa
- InterRegio (IR)
-
Beiträge: 136 Registriert am: 31.12.2019 Ort: Best (Niederlande) Gleise Tillig Elite Spurweite H0 Steuerung Uhlenbrock + iTrain (Raspberry) Stromart DC, Digital

RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5866 von
Hardi
, 30.04.2021 00:28
#5866 von
Hardi
, 30.04.2021 00:28
Hallo Blindplatinenbesteller und Schrittmotor Benutzer,
Nachdem Erich hier einen Link auf seien schönen Bericht zu der neuen Platine veröffentlicht hat
Zitat
Liebe Freunde der MobaLedLib, es ist mutig, Platinen zu bestellen, bevor man überhaupt weiß, wofür sie gut sein könnten, aber wir wollen nun etwas Licht ins Dunkel bringen. Kurz gesagt geht es um die "Hochzeit von Micro-Schrittmotoren mit der MobaLedLib"
Hier zum Appetitanregen :
http://www.erich-wedeking.de/Modellbahn/...2021.4.2021.mp4
Wenn Hardi nicht so schnell seinen Platinenentwurf präsentiert hätte, hätten wir eigentlich lieber noch etwas experimentiert und geplant, aber sei es drum, hier ein Anfangsbericht. Weil er einige Fotos und Videos enthält und ich keine Lust habe, mich mit Formatfragen im Forum auseinanderzusetzen, sende ich ihn lieber als Link zu meiner Webseite.
http://www.erich-wedeking.de/Modellbahn/Beitrag.pdf
In dem PDF-Dokument ist auch ein Link auf eine Bauanleitung mit Funktionsbeschreibung enthalten.
Viel Vergnügen und/oder Erfolg
Erich und Michael
Möchte ich noch ein paar Details zu der Platine nachtragen. Doch zunächst noch mal ein paar Links zu seinen Videos:
Umgebautes Signal mit Schrittmotor Steuerung:

http://www.erich-wedeking.de/Modellbahn/...2021.4.2021.mp4
Weichenbewegung von oben:
http://www.erich-wedeking.de/Modellbahn/...0von%20oben.mp4
Weichenbewegung von unten:

http://www.erich-wedeking.de/Modellbahn/...von%20unten.mp4
Hier findet Ihr noch mal einen detaillierten Bericht:
http://www.erich-wedeking.de/Modellbahn/...0MobaLedLib.pdf
Erich ist bewusst nicht auf die von mir entwickelte Platine eingegangen, weil er (zurecht) befürchtet hat, dass ich noch weiter optionale Features einbauen werde…
Darum mach ich das mal schnell.
Und so sieht die Platine von oben aus:

Man beachte, dass ich mir ganz große mühe gegeben habe, dass die Platine einfach zu bestücken ist. Eigentlich hätte man das locker auf die halbe Fläche gebracht…
Von unten kennt Ihr die Platine ja schon. Hier ist sie unzensiert:
Die Platine ist 69 x 38 mm groß. Sie enthält wieder ganz Hardi Typisch viele Optionen welche man nicht alle nutzen muss.
Aber wenn ich schon eine Schaltung entwerfe, dann soll sie möglichst viele Anwendungsfälle abdecken.
Mit der Schaltung kann man winzige, wenige Millimeter große Schrittmotoren und ebenso richtig große NEMA17 Motoren ansteuern. Für letzter habe ich zwei verschiedene Möglichkeiten vorgesehen wie man den Antrieb per Endschalter stoppt (Schalter mit Kontakten welche am Ende öffnen, Hallsensoren oder Schließer).
Bei dieser einfachen Schaltung kann man die Geschwindigkeit des Schrittmotors (zunächst) nicht per Programm verändern. Es gibt auch keine Möglichkeit den Schrittmotor langsam zu beschleunigen oder anzubremsen. Man kann nicht mal die Anzahl der Schritte vorgeben.
Aber das macht in vielen Anwendungen nichts.
Der große Vorteil ist, dass die Schaltung ohne einen eigenen Prozessor auskommt. Dadurch ist der Nachbau viel einfacher, weil man keinen Prozessor programmieren muss. Außerdem ist die Geschichte dadurch billiger.
Wichtig ist sicherlich auch, dass die Lösung sofort verfügbar ist. Die „richtige“ Ansteuerung von Schrittmotoren verspreche ich ja schon seit zwei Jahren ;-(
Vielleicht braucht man die komplexe Schrittmotorsteuerung auch gar nicht mehr unbedingt. Ich hatte mir ja immer vorgenommen, dass man die Bewegung des Schrittmotors ganz einfach über den Pattern_Configurator erstellen kann. Damit sind dann ohne Programmierung selbst komplexe Bewegungsabläufe konfigurierbar. Ein Beispiel wäre ein richtiges nachwippen. Hier könnte man die physikalischen Abhängigkeiten wunderbar modellieren.
Aber das ist doch recht aufwändig und darum finde ich es sehr gut, dass wir dank Erich und Michael jetzt eine einfache Variante zum Ansteuern von Schrittmotoren haben.
Vielen Dank!
Doch jetzt erst mal die Schaltung:

(Hier gibt es den Plan in groß: https://github.com/Hardi-St/MobaLedLib_D...Stepper_Sch.pdf)
Ja, das sieht ganz und gar nicht nach einer „Einfachen Schrittmotor Steuerung“ aus.
Ihr wisst, dass ich „Einfach“ nicht kann. Das ist ein Gendefekt bei mir ;-(
Darum habe ich mir mal die mühe gemacht und einen wirklich einfachen Schaltplan zu erstellen:

(https://github.com/Hardi-St/MobaLedLib_D...per_Einfach.pdf)
Das ist besser, oder?
Hier erkennt man die Funktionen. Der WS2811 generiert über den roten Kanal das „Step“ Signal. Dieses hat eine Frequenz von 2 kHz. Damit werden 2000 Schritte Pro Sekunde generiert. Über die drei MS Jumper kann dieses Signal noch mal geteilt werden. Dadurch kann die Geschwindigkeit des Schrittmotors halbiert, geviertelt, geachtelt und durch 16 geteilt werden. Die Tabelle im Schaltplan zeigt die dafür benötigten Jumper Positionen. Wenn alle drei Jumper so wie im Plan gezeigt gesetzt sind, dann wird das Signal durch 16 geteilt. Der Schrittmotor mach also nur noch 125 Schritte pro Sekunde. Das ist schon ziemlich langsam.
Wenn man anstelle des SMD WS2811 das ältere DIL IC Benutzt, dann sind es noch viel weniger Schritte. Der alte WS2811 generiert nämlich nur ein Signal mit 400Hz. In dem Fall wird man die Jumper anders setzen müssen.
Der Schrittmotor soll sich aber nicht nur in eine Richtung drehen. Das wird über den grünen Kanal des WS2811 gesteuert. Dieser wird mit der Helligkeit 0 oder 255 angesteuert. Mit 0 dreht sich der Motor in die eine Richtung mit 255 in die andere. Welche Richtung das ist hängt vom Anschluss des Schrittmotors ab. Der Kondensator C1 sorgt dafür, dass das Richtungssignal dauerhaft anliegt. Denn selbst wenn man dem WS2811 die Helligkeit 255 vorgibt, ist das Ausgangssignal nicht immer aktiv. Mit dem Kondensator werden die kurzen Pausen im PWM Signal herausgefiltert.
Die Diode D1 und der Kondensator C2 haben eine ähnliche Aufgabe. Die generieren das „Enable“ Signal. Mit diesem Signal wird der Schrittmotortreiber aktiviert. Das soll nur dann passieren, wenn sich der Motor drehen soll denn sonst würde er im Stillstand unnötig heiß.
Das ist doch gar nicht so kompliziert.
Und warum hat der Kerl dann noch so viel anderes Zeug eingebaut?
- Die Transistoren Q1 und Q2 werden für die Endabschaltung benötigt. Hier soll der Motor über zwei Schalter gestoppt werden, wenn er an den Endpositionen angekommen ist. Dabei soll natürlich immer nur die eine Drehrichtung blockiert werden denn sonst könnte man den Motor nicht mehr zurückbewegen. Die Abschaltung muss so gestaltet sein, dass dann kein Strom mehr durch den Schrittmotor fließt damit dieser nicht überhitzt. Bei großen Schrittmotoren ist das aber u.U. gewollt. Hier muss evtl. eine andere Schrittmotoransteuerung eingesetzt werden. Mit dem TMC2208 ist eine automatische Stromreduzierung möglich. Allerdings funktionieren hier die MS Eingänge anders.
- Normalerweise wird man Schalter zur Endabschaltung einsetzen welche öffnen, wenn die Endposition erreicht ist. Das hat den Vorteil, dass der Motor stehen bleibt, wenn mal versehentlich das Kabel unterbrochen ist. Michael hatte den Vorschalg gemacht, dass man anstelle eines mechanischen Schalters auch eine Hallsensor (z.B. den TLE4905) einsetzen kann. Diese Sensoren sind super klein und können einfach über einen Magneten angesteuert werden. Dafür benötigt man aber dann zwei weitere Transistoren (Q3 & Q4) welche das Signal invertieren. Damit besteht auch die Möglichkeit, dass Schalter verwendet werden welche einen Kontakt schließen, wenn die Endposition erreicht ist. Eine dritte Variante die sich mit den Transistoren ergibt sind Lichtschranken.
- Bei einem SMD WS2811 hat zunächst man folgende mögliche Schrittgeschwindigkeiten:
2000, 1000, 500, 250, 125 Schritte pro Sekunde.
Das ist unter Umständen nicht fein genug. Darum habe ich auf der Platine ein weiteres IC vorgesehen. Mit dem 4017 können zusätzlich folgende Teiler geschaltet werden: 2, 3, ..10. Kann man den Motor mit 45 verschiedenen Geschwindigkeiten drehen lassen. - Der WS2811 hat aber noch einen dritten Ausgang. Den blauen Kanal. Den konnte ich natürlich nicht unbenutzt lassen. Er kann für zwei verschiedene Dienste genutzt werden.
Über die untere Position der Mode Select Jumper (MS1- MS3) kann man per MobaLedLib zwischen zwei verschiedenen Geschwindigkeiten umschalten. Wenn man auf dem blauen Kanal die „Helligkeit“ 255 sendet, dann entspricht das dem entfernen des Jumpers.
Beispiel:
Wenn der MS3 Jumper in der unteren Position gesteckt ist und die beiden anderen Jumper in der oberen Position sitzen, dann kann zwischen 250 und 125 Schritten pro Sekunde umgeschaltet werden. - Die zweite Nutzungsmöglichkeit des blauen Kanals ist die Ansteuerung einer LED. So kann man beispielsweise die Weichenlaterne oder die Laterne eines Signals über die Bibliothek schalten. Genau so kann man natürlich auch das Blinklicht eines Windgenerators ansteuern.
- Auf der Platine sind drei verschiedene Stecker für die unterschiedlichen Schrittmotoren vorgesehen. Ein kleiner 4-poliger welche durch das Loch für eines Signal in der Grundplatte der Anlage passt, der Stecker welcher bei dem billigen 28BYJ-48 Stepper verwendet wird und außerdem ein 4-poliger Stecker welche zu den NEMA Motoren kompatibel ist.
Achtung der 28BYJ-48 Stepper muss zu einem Bipolaren Stepper umgebaut werden. Frank hat hier gezeigt wie das geht: viewtopic.php?f=170&t=140471&start=495#p2206223
Dazu muss eine Leiterbahn im Stepper unterbrochen werden und das rote Kabel wird auch nicht verwendet: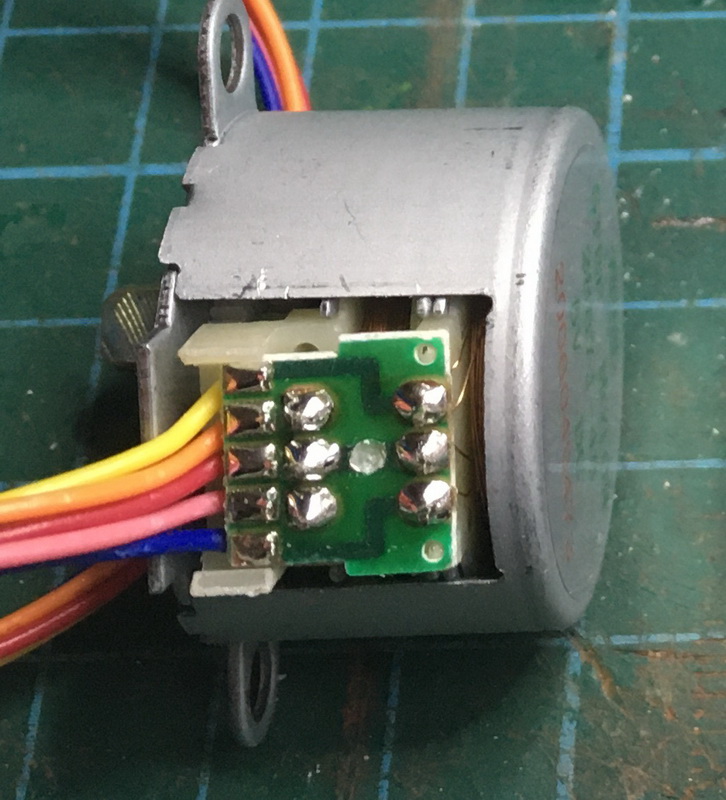
- Die Schrittmotoren müssen (auch wenn sie mit eine Betriebsspannung von 5V angegeben sind) mit mindestens 12V betrieben werden. Das ist notwendig damit das Magnetfeld schnell genug aufgebaut werden kann. Der Schrittmotortreiber sorgt dafür, dass die Spulen trotzdem nicht mehr als den über das Poti eingestellten Wert bekommen. Darum benötigt die Platine eine zusätzliche Spannungsversorgung. Diese kann über das 6-poligen Flachkabel kommen oder über eine Schraubklemme eingespeist werden.
Achtung: Bevor man den Schrittmotor ansteckt muss der Strom über das Poti auf der A4988 Platine eingestellt werden. Dazu misst man die Spannung am Poti gegen Masse. Für die kleinen Motoren ist ein Wert von 0.15V richtig. Wenn man das nicht macht, dann wird der Schrittmotor zum Rauchgenerator ;-(
Achtung: Die 6. Leitung des MobaLedLib Flachkabels kann entweder als zusätzliche 5V Leitung ODER als 12V Leitung verwendet werden. Dazu gibt es auf allen Platinen Lötjumper 6=5V und 6=12V. Man muss sich für eine der beiden Varianten eintscheiden! Wenn man diese Möglichkeiten mischt, dann kann es passieren, das die 12V im 5V Kreis landen. Und das bedeutet den Tod für Bauteile. Dann müsst Ihr u.U. alle LEDs in den Häusern ersetzen!
=> Mann muss sehr genau wissen was man macht! - Das letzte Feature ist die Möglichkeit zum aneinanderreihen der Platinen. Über die Anschlüsse SV1 und SV3 können zwei benachbarte Platinen untereinander verbunden werden. Dann muss nur bei der untersten Platine der 6-polige Stecker O1 bestückt werden. Der Lötjumper „TERM“ muss auf der letzten Platine verbunden werden. Nutz man diese Möglichkeit nicht, dann muss der „TERM“ ebenfalls geschlossen werden denn sonst funktionieren die folgenden Komponenten welche an der Verteilerplatine angeschlossen sind nicht.
Jetzt habe ich genug über die Platine gelabert.
Vielleicht fällt Euch noch etwas an der Platine auf. Wenn ja, dann meldet Euch.
Zitat
Hallo Stammtisch Teilnemer,
Ich dachte eine Weile über die Frage nach, die Hardi gestern Abend gestellt hatte: Wie lenke ich den Steppenmotor in die gewünschte Position? ... Zeit?
Sie kennen die Frequenz = Anzahl der Impulse + Anzahl der Schritte pro Umdrehung = Position? Oder ist das zu kurzsichtig?
Theo.
Im Grunde kann man die Position über die Zeit bestimmen. Allerdings ist das nicht besonders genau. Man kann zwar im Pattern_Configurator eine Zeit im Millisekunden angeben, aber diese wird nicht immer exakt eingehalten. Zu meinen liegt das daran, dass die LEDs nur alle 20ms ein neues Signal bekommen. Die Aktualisierungsgeschwindigkeit sollte nicht höher sein, weil die LEDs sonst anscheinend zu warm werden. Außerdem ist der Arduino abhängig von der Komplexität der Konfiguration nicht in der Lage diese Aktualisierungsfrequenz einzuhalten. Das Bedeutet, dass man bei der Zeit mindestens mit einer Ungenauigkeit von 40ms rechnen muss. Bei einer langsamen Bewegung spielt das keine so große Rolle. Ein Umgreifen bei der Signalansteuerung kann man damit ganz schön lösen. Aber eine exakte Positionierung ist so nicht möglich. Auf diese Weise kann man also keine Schiebebühne steuern ;-(
Hardi
Haltet Euch unbedingt von diesen Seiten fern:
viewtopic.php?f=7&t=165060
https://wiki.mobaledlib.de/
sonst wird Eure Anlage niemals fertig…
Unsere Anlage findet Ihr hier:
RE: Unsere Kinder und Vater Anlage(n)
RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5867 von
sarguid
, 30.04.2021 09:56
#5867 von
sarguid
, 30.04.2021 09:56
Bezugsquelle WS2811 DIP
Hallo liebe Mobaledlibfreunde,
nachdem ich mit Begeisterung die LED Beleuchtung verwende, wollte ich mich (als Nichtelektroniker), mal an die nächste Stufe wagen und meine Servos damit steuern.
Allerdings scheitere ich aktuell an den WS2811 DIP für das Servomodul - im Netz finde ich keine Bezugsquelle für die DIP Bauweise (mit SMD Bauweise habe ich so meine Probleme - sorry).
Kann mir da jemand mit einer Bezugsquelle weiterhelfen?
Besten Dank im Voraus
Matthias
Matthias aka sarguid
-------------------------
H0 und H0e digital DCC - TrainController - Tams Redbox+ IB Basic - Tillig/Roco - Gleichstrom
Hompage Stummiforum Youtube Kanal
RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5868 von
raily74
, 30.04.2021 09:58
#5868 von
raily74
, 30.04.2021 09:58
Zitat
Kann mir da jemand mit einer Bezugsquelle weiterhelfen?
Hallo Matthias,
schau mal sechs Beiträge weiter oben 😉
Viele Grüße, Michael
Das 3-Generationen-Projekt | H0-Epoche V Anlage im Bau
YouTube MLL ▶ | Erwecke deine Modellbahn zum Leben
MobaLedLib Wiki | Alle Lösungen zentral an einem Ort
- raily74
- EuroCity (EC)
-
Beiträge: 1.458 Registriert am: 05.12.2006 Ort: Kassel (LK) Gleise Roco Line Spurweite H0 Steuerung Z21, iTrain, MobaLedLib Stromart DC, Digital
RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5869 von
Railcar
(
gelöscht
)
, 30.04.2021 10:29
#5869 von
Railcar
(
gelöscht
)
, 30.04.2021 10:29
Nicht verzagen - Alf fragen.
https://stummiforum.de/viewtopic.php?p=2286042#p2286042
Ulrich
- Railcar
RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5870 von
sarguid
, 30.04.2021 10:42
#5870 von
sarguid
, 30.04.2021 10:42
Danke! Hatte jetzt gar nicht erwartet das hier gerade eh die Diskussion darüber läuft (sorry - hab von Schrittmotoren keinen blassen Schimmer)
Also hat Alf noch welche? (Ich wollte eigentlich nicht wegen 4 x WS2811 schon wieder Alibaba bemühen und 2 Monate warten)
Dann schreibe ich ihn mal direkt an.
Viele Grüße
Matthias
Matthias aka sarguid
-------------------------
H0 und H0e digital DCC - TrainController - Tams Redbox+ IB Basic - Tillig/Roco - Gleichstrom
Hompage Stummiforum Youtube Kanal
RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5871 von
Railcar
(
gelöscht
)
, 30.04.2021 10:49
#5871 von
Railcar
(
gelöscht
)
, 30.04.2021 10:49
Hi Matthias,
hier gehts manchmal drunter und drüber, 10 Mann reden über Schrittmotoren, da weiss man manchmal nicht ob man einfach "dazwischengrätschen" kann. Kein Problem, dafür ist das Forum da...... Einfach fragen - irgendwer wird schon antworten - hier gibts kein OffTopic wie in einigen anderen Foren, wo du verbal geschlagen wirst wenn deine Frage nicht zum Thema passt - hier nicht.
Ulrich
- Railcar
RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5872 von
andreakarina
, 30.04.2021 11:48
#5872 von
andreakarina
, 30.04.2021 11:48
Hallo.
Auch wir Erich, Walter und, meine wenigkeit werden ein kleine Platine für die Schrittmotoren endwickel und herstellen.
Sobald diese fertig ist werden wir es im Forum bekanntgeben.
Mfg
- andreakarina
- RegionalExpress (RE)
-
Beiträge: 63 Registriert am: 29.03.2015 Spurweite H0

RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5873 von
Erich-N-Bahner
, 30.04.2021 13:42
#5873 von
Erich-N-Bahner
, 30.04.2021 13:42
Noch keine Lösung, aber vielleicht eine Idee:
Zitat
TMaa hat geschrieben: ↑Do 29. Apr 2021, 20:15
Hallo Stammtisch Teilnemer,
Ich dachte eine Weile über die Frage nach, die Hardi gestern Abend gestellt hatte: Wie lenke ich den Steppenmotor in die gewünschte Position? ... Zeit?
Sie kennen die Frequenz = Anzahl der Impulse + Anzahl der Schritte pro Umdrehung = Position? Oder ist das zu kurzsichtig?
Theo.
Zitat
Hallo Blindplatinenbesteller und Schrittmotor Benutzer,
Nachdem Erich ...
Im Grunde kann man die Position über die Zeit bestimmen. Allerdings ist das nicht besonders genau. Man kann zwar im Pattern_Configurator eine Zeit im Millisekunden angeben, aber diese wird nicht immer exakt eingehalten. Zu meinen liegt das daran, dass die LEDs nur alle 20ms ein neues Signal bekommen. Die Aktualisierungsgeschwindigkeit sollte nicht höher sein, weil die LEDs sonst anscheinend zu warm werden. Außerdem ist der Arduino abhängig von der Komplexität der Konfiguration nicht in der Lage diese Aktualisierungsfrequenz einzuhalten. Das Bedeutet, dass man bei der Zeit mindestens mit einer Ungenauigkeit von 40ms rechnen muss. Bei einer langsamen Bewegung spielt das keine so große Rolle. Ein Umgreifen bei der Signalansteuerung kann man damit ganz schön lösen. Aber eine exakte Positionierung ist so nicht möglich. Auf diese Weise kann man also keine Schiebebühne steuern ;-(
Hardi
Ich muss Hardi recht geben, eine Steuerung über die Zeit kann man bei unkritischen Abläufen, wie einer Weichen- oder Signalschaltung machen, wo man die Motoren einfach bis zum Anschlag laufen lässt. Für eine genaue Positionierung benötigt man allerdings nicht die Zeit, sondern die Anzahl der Schritte.
Ich habe einmal die Schaltung, die wir eingesetzt haben, etwas verändert (R1 vergrößert, C4 zugefügt):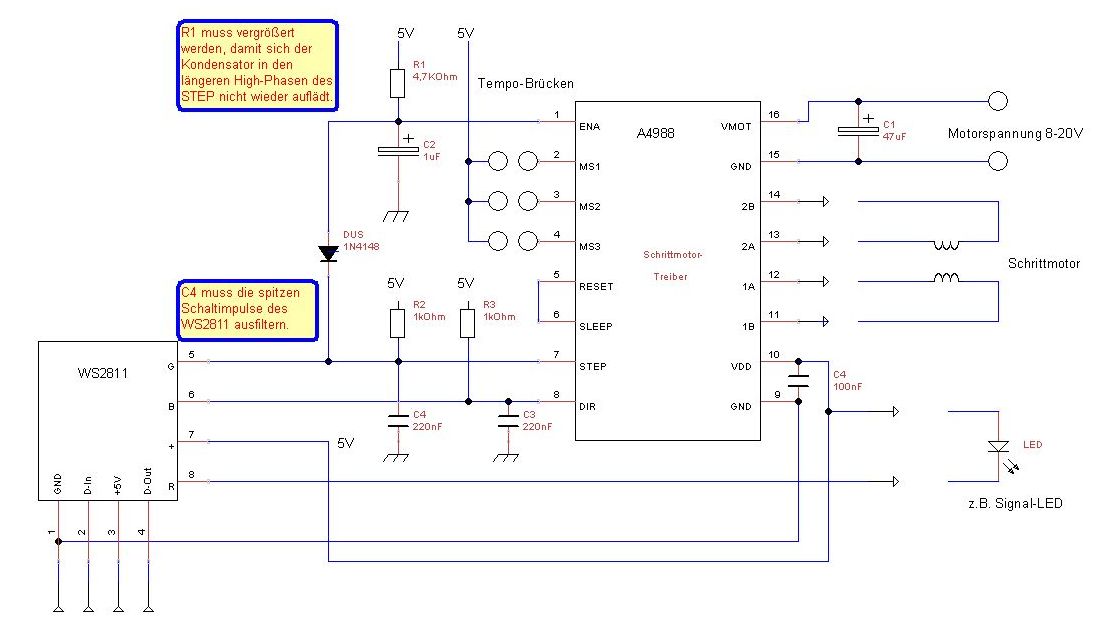
Ich habe dann über den Pattern-Configurator ein einfaches Rechtecksignal erzeugt - in Anlehnung an den Wechselblinker :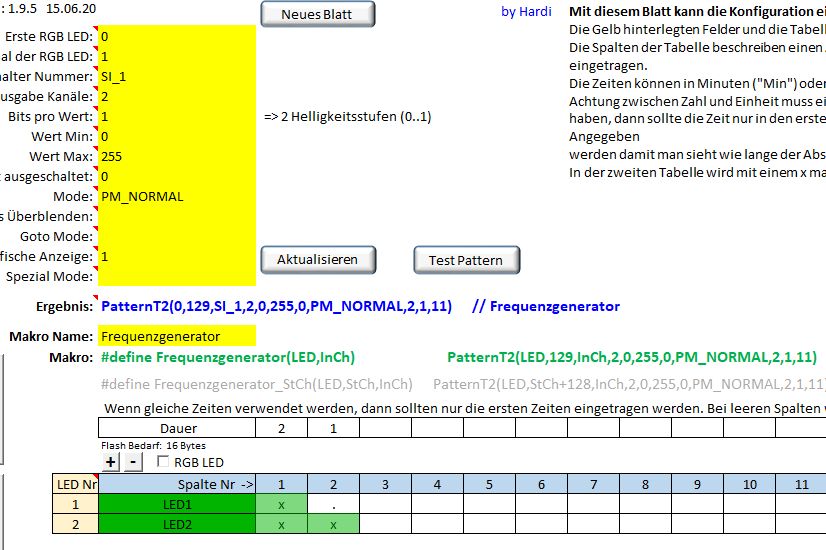
Die Idee war, erst einmal ein "sauberes" Rechtecksignal mit 333 Hz zu erzeugen mit doppelt so langer Low- wie High-Zeit um den Kondensator am ENA-Eingang sicht nicht wieder aufladen zu lassen.
Mit den Schaltungsänderungen oben funktionierte der Schrittmotor, die Frenquenz betrug aber 200 Hz und die Low- und High-Zeiten waren gleich, etwa 2,5 ms. Offensichtlich kann das System nicht schneller schalten. Wenn man die Low-Zeit (logisch 1) verlängert, bemerkt man dies etwa ab einem Wert von 4 ms. Dann sieht man aber auch, dass diese Frequenz nicht stabil ist, sondern sich immer wieder längere Phasen einschieben.
Diese Unregelmäßigkeit ist hier nicht störend, wenn es nicht auf die Zeit, sondern auf die Anzahl der Schritte ankommt.
RESTPROBLEM :
Das oben abgebildete Pattern läuft so lange, wie es aktiviert wird, eine Zählung findet nicht statt. Dieses Muster z.B. 100 mal hintereinander zu schreiben liefert zwar mit Sicherheit genau 100 Schritte, die Lösung ist aber unflexibel und idiotisch.
Innerhalb eines Programms würde man jetzt eine Zählschleife einsetzen - diese Möglichkeit gibt es aber nicht.
Wer bringt also der MobaLedLib das Zählen bei????
Viel Spaß beim Tüfteln
Erich
- Erich-N-Bahner
-
Beiträge: 5 Registriert am: 28.02.2020 Spurweite N Steuerung Z21 Stromart DC, Digital
RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5874 von
raily74
, 30.04.2021 13:58
#5874 von
raily74
, 30.04.2021 13:58
Hallo zusammen,
ich habe soeben ein weiteres 3D-Gehäuse für die Verteiler-Platine im Wiki veröffentlicht.
Ursprünglich habe ich dieses entworfen, um nicht jedes Mal alle Pfostenbuchsen rausziehen zu müssen, wenn ich im Inneren einen Jumper nach der Lazy-Methode* wechseln wollte. Auf Dauer ist das Wechseln der Jumper unter der Anlage aber doch lästig und nichts für meine Augen. Deswegen hat Ali heute 1.000 lange, gelbe Jumper geliefert, die ich auch im Dunkeln gut erkennen kann.
Wer mit der Lazy-Methode* arbeitet findet aber ggf. Gefallen an der Gehäuse-Variante. Die Datei für die Aufkleber hab ich auch hinzugefügt.
*) Nur ein Jumper je Verteilerplatine, der immer wieder an die letzte Position umgesteckt wird.
Viele Grüße, Michael
Das 3-Generationen-Projekt | H0-Epoche V Anlage im Bau
YouTube MLL ▶ | Erwecke deine Modellbahn zum Leben
MobaLedLib Wiki | Alle Lösungen zentral an einem Ort
- raily74
- EuroCity (EC)
-
Beiträge: 1.458 Registriert am: 05.12.2006 Ort: Kassel (LK) Gleise Roco Line Spurweite H0 Steuerung Z21, iTrain, MobaLedLib Stromart DC, Digital
zuletzt bearbeitet 25.04.2024 12:07 | Top
RE: MobaLedLib: 768 LEDs, Servos, Sound, …………… Neu: Version 3.0.0
![]() #5875 von
EP2Bernie
, 30.04.2021 15:33
#5875 von
EP2Bernie
, 30.04.2021 15:33
Hallo MLL- und Stepperfreunde,
nach dem super interessanten Stammtisch (ganz lieben Dank an alle), habe ich mir Gedanken über die Stepperplatine gemacht. Diese ist mir für meine Weichensteuerung ganz wichtig.
Jetzt kam mir der Gedanke, wenn ich ca. 60 Weichen mit den Ministeppern steuern möchte, dass ich ja 60 Platinen benötige, und dann nochmals 20 Platinen für die Herzstückpolarisation (530). Zusätzlich kommen noch x Verteilerplatinen dazu. Und die noch zu planenden Signale..... Da wird es unter der Anlage ziemlich eng bei den vielen Platinen.
Als absoluter Nichtelektroniker sehe ich mich nicht in der Lage, eine Platine zu entwickeln, welche die Stepperweichen steuert UND auch die dazugehörigen Herzstücke umschaltet.
Ist das eine Idee, die nicht nur für mich in Frage kommt? Besteht vielleicht ein Interesse auch von anderen Stepperfreunden?
Ich fände es eine Super Sache, wenn sich da was tun könnte. Vielleicht kann ich damit auch einen Beitrag zur erfolgreichen MLL beitragen.
Aber die gesamte MLL ist alleine auch schon so eine Super Sache. 
EP2Bernie
mit freundlichen Eisenbahnergrüßen, Bernd
H0-2-Leiter Gleichstrom,
BiDiB-digital, Multimaus,
Rocrail, Lokdecoder: Zimo, Lenz
MobaLedLib
- EP2Bernie
- RegionalExpress (RE)
-
Beiträge: 57 Registriert am: 21.12.2019 Ort: 710xx Gleise ROCO 2,5mm Spurweite H0 Steuerung BiDiB Fichtelbahn Stromart DC, Digital
-
- Ähnliche Themen
- Antworten
- Zugriffe
- Letzter Beitrag
-
- Sound File für GFN G 4.3
Erstellt im Forum Umbauten / Eigenbauten von Mistral 68 - 0
- 243
- Letzter Beitrag von
Mistral 68

11.04.2023
- Sound File für GFN G 4.3
-
- 💡🚂🚃🚃 DKW-Laterne mit MobaLedLib Charlieplexing
Erstellt im Forum Software und Hardware von fbstr - 0
- 772
- Letzter Beitrag von
fbstr
12.03.2022
- 💡🚂🚃🚃 DKW-Laterne mit MobaLedLib Charlieplexing
-
- MobaLedLib Aquarium Projekt - Beleuchtung, Aquascape, Pandora und Rio Negro Biotop
Erstellt im Forum Anlagenbau von - 2
- 534
- Letzter Beitrag von
Flohfix
29.01.2021
- MobaLedLib Aquarium Projekt - Beleuchtung, Aquascape, Pandora und Rio Negro Biotop
-
- 🚂🚃🚃 Frank's Projekt: Bahnpark Augsburg
Erstellt im Forum Modul- und Segmentbau von - 846
- 238178
- Letzter Beitrag von
FarFarAway
10.03.2024
- 🚂🚃🚃 Frank's Projekt: Bahnpark Augsburg
