
Hallo md95129,
ja, das ist mir schon klar. Ich hatte da nur an die Problematik bei Glockenanker-Motoren gedacht.
Der Kondensator würde dann je nach Kapazität die Flankensteilheit etwas entschärfen. Ob das dann wirklich was bringt, kann ich nicht beurteilen. Mir fehlt das nötige Fachwissen und Messtechnik. Programmieren und Elektrik habe ich mir, je nach Aufgabenstellung selber beigebracht. Daher Stelle ich hier auch solche Fragen.
Meine alten DDR HO Pikoloks brauchen zum Anfahren einen längeren PWM Puls. Wenn die dann in Bewegung sind, kann man die im Schleichgang fahren. Ich habe daher ein einstellbaren Anfahrimpuls mit einprogrammiert. Die Problematik bei der Schleichfahrt ist der Schienenkontakt. Besonders bei 2 Achsern müssen das Gleis und die Räder absolut sauber sein. Einen einfacher Puffer in der Lok würde nach meinem Wissensstand, auch die PWM Flanken glätten. Da wäre eine Schwungradmasse besser. Aber die erhört dann wieder den Anfahrwiderstand. Weil die Hammerschläge absorbiert werden.
Soweit meine theoretischen Gedankengänge. Meine Piko Testloks fahren am besten mit 121 bis 500 Hz an. Die Werte
kann ich über Funktionstasten auswählen.
Frage:
Meine Loks mit DCC Decoder fahren bei entsprechender Einstellung (Automatische Analog-/Digitalumschaltung) auch mit der PWM Spannung, ist das langfristig empfehlenswert, oder schadet dass den Decodern.
Viele Grüße Martin
RocRail Gleisplan mit 7 Trafos: Fahrstraße für Trafo100 von bk2 nach bk5 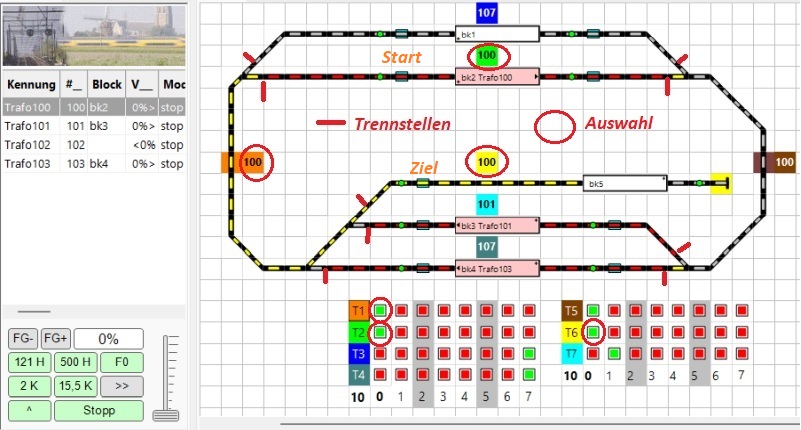
Jeder Trafo kann eine beliebige Adresse von 100 bis 107 annehmen.
Ich habe das in Rocrail so Programmiert, das die richtigen Trafos über die Fahrstraßenschaltung Star Ziel geschaltet werden.
Es wird die Adresse aus dem Startblock verwendet. Hier ist das Grün 100. Das in Rocrail zu realisieren bedarf aber XML Script Kenntnisse.
Zu dem Thema:
https://bluethners.de/DCCProjekt/Zentrale/DigitalTrafo.html
Gleisplan mit Rocrail:
https://bluethners.de/DCCProjekt/Zentral...ocRailGleisplan
 Stummis Modellbahnforum
Stummis Modellbahnforumwww.stummiforum.de
RE: PWM Fahrregler - Eigenbau
![]() #26 von
Hobbyprog
, 07.08.2023 13:52
#26 von
Hobbyprog
, 07.08.2023 13:52

RE: PWM Fahrregler - Eigenbau
![]() #27 von
alexus
, 07.08.2023 14:30
#27 von
alexus
, 07.08.2023 14:30
Hallo Martin @Hobbyprog 
Zu digitaler Lok und PWM.
Ich hab mal für meinen Nachbarn (reiner AC Analogfahrer, u. a. mit Steuerpulten Märklin 6600) diverse Versuche mit digitalen Loks gemacht. Verwendet wurden da Tams Decoder ld-g32 und ld-g33 (älter) und neue Zimo Decoder, mx63x Serie.
Hauptsächlich waren die Versuche wegen der Umschaltimpulsfestigkeit. Aber es hat sich dabei herausgestellt das die Digitaldecoder mit der niedrigen PWM eines Märklin 6600 Fahrpultes gar nicht gut klarkommen. Das war nur eine Ruckelei und Stehenbleiberei.
Meine Vermutung ist das die Digitaldecoder eine gewisse Grundspannung brauchen um zu arbeiten und dazu reicht es wohl bei niedriger PWM Frequenz nicht.
Es war auch so das speziell die Zimodecoder bei AC-Analogbetrieb (mit Trafo) später losfuhren als die Tams und auch wie eine „Gedenksekunde“ einlegten. Vielleicht habe die Zimos länger auf ein Digitalsignal gewartet .
.
Alexander aus dem südlichsten Allgäu
Digital mit altem Blechgleis auf dem Boden
TamsMC, Booster B4, alte Digitalkisten
Bekennender ATF-Öl Anwender
- alexus
- Metropolitan (MET)
-
Beiträge: 3.515 Registriert am: 13.12.2005 Ort: Ganz im Süden Deutschlands Gleise M-Gleis Spurweite H0 Steuerung Tams MC, B4, alte Mä-Digitalkomponenten Stromart Digital

RE: PWM Fahrregler - Eigenbau
![]() #28 von
Stahlblauberlin
, 07.08.2023 14:34
#28 von
Stahlblauberlin
, 07.08.2023 14:34
Leider gehen ganz besonders bei den kleinen Spuren die Anforderungen an die Ansteuerung der verschiedenen Motorentypen sehr weit auseinander. Einem ausgewachsenen, schräggenutetem H0-Fünfpoler mit Schwungmasse ist es komplett egal ob mit 50 Hz oder 32 kHz-PWM angesteuert. Bei 50 hz brummt er halt leicht.
Ein Z-Dreipoler und ein Z-Glockenankermotor wollen aber ganz verschiedenes: Der Dreipoler möchte am liebsten mit Einzelpulsen von Rastpunkt zu Rastpunkt geschubst werden, vor allem bei niedrigen Geschwindigkeiten. Mit einer 50Hz-PWM-Steuerung läuft er dabei zwar brummig aber ansonsten ordentlich. Ein Glockenankermotor hingegen wünscht sich eine möglichst hochfrequente PWM-Ansteuerung (20-30 kHz), am besten reinen Gleichstrom. Die Fünfpoler fühlen sich so bei 120-200 Hz am wohlsten.
Mit einer einfachen Schaltung ist das nicht unter einen Hut zu bekommen, schon gar nicht automatisch umschaltend. Experimente die pulsierende Gleichspannung mittels Kondensatoren für Glockenankermotoren zu glätten kann man sich auch sparen, glättet man auf ein für Glockenankermotoren bekömmliches Niveau kann man sich die ganze Elektronik komplett sparen und das Netzteil/die Batterie direkt ans Gleis klemmen. Siebkondensatoren laden sich auf die Spitzenspannung des PWM-Signals auf, setzt man 10% Restwelligkeit an ergibt das ~95% der Spitzenspannung am Motor, gleichzeitig kommt der PWM-Steller ins Schwitzen. Der Piko-C4-Effekt schlägt dann voll zu. Für die Nicht-Piko-H0-Fahrer: Piko hat bei diversen H0-Modellen einen mit 0,1µF sehr großzügigen Entstörkondensator, mit C4 auf der Platine bezeichnet, verbaut. Dieser belastet mit seinen Ladestromspitzen die Endstufen von etwas auf Kante genähten Decodern stark und verwirrt auch die Lastregelung.
Würde man für einen Z-Glockenankermotor einen dann korrekt als solchen eingesetzten Kondensator verbauen (~22-47µF) würde das die Endstufe eines entsprechenden Stellers echt quälen.
Im Digitalbetrieb erledigt sich das ganze dadurch das jede Lok ihren individuell eingestellten Decoder hat, niederfrequent für ältere Drei- und Fünfpoler, 32 kHz für Glockenanker, das ganze mit einer Lastregelung abgerundet. Damit läuft auch eine steinalte 89 mit Dreipoler sehr manierlich, auf dem selben Gleis wie eine aktuelle 24er mit Glockenanker. Bei der ist halt der Decoder anders eingestellt.
- Stahlblauberlin
- Metropolitan (MET)
-
Beiträge: 3.356 Registriert am: 07.03.2022 Ort: Berlin Spurweite H0, Z, G Steuerung Roco digital, Z21-Nachbau Stromart DC, Digital, Analog
RE: PWM Fahrregler - Eigenbau
![]() #29 von
AlexanderJesse
, 07.08.2023 15:07
#29 von
AlexanderJesse
, 07.08.2023 15:07
Hallo Henner ( @md95129 )
Die Diskussion, warum man lieber Analog oder Digital fährt sollten wir aus dem Thread rausnehmen. Geht schon fast unter Spamming. Hier geht's ja um den Fahrtregler. Am besten sollte so eine Diskussion sogar im Biergarten im Beisein von ein paar guten Mass Bier und 'nem Bretzel. Kann auch ein anderes Getränk sein 

Gruss
Alexander
===========================================
Eine richtige Lokomotive macht "Tschuff-Tschuff" 
- AlexanderJesse
- InterCity (IC)
-
Beiträge: 841 Registriert am: 19.01.2017 Spurweite N Stromart Analog
RE: PWM Fahrregler - Eigenbau
![]() #30 von
Stahlblauberlin
, 07.08.2023 15:26
#30 von
Stahlblauberlin
, 07.08.2023 15:26
Zitat von AlexanderJesse im Beitrag #29
Die Diskussion, warum man lieber Analog oder Digital fährt sollten wir aus dem Thread rausnehmen.
Das habe ich auch nur mit reingenommen weil da hat die eigentlich nötige lokindividuelle Abstimmung der Motorsteuerung quasi als Abfallprodukt anfällt. Das hat auch nichts mit irgendwelchen Vorlieben zu tun sondern handfeste technische Gründe.
Bei Z ist es halt aus eigener praktischer Erfahrung deutlich schwieriger alles unter einen Hut zu bekommen, gerade bei den kleinen Baugrößen kommen die unterschiedlichen Bedürfnisse der verschiedenen Motorkonzepte besonders ausgeprägt zum Tragen.
Zitat von Hobbyprog im Beitrag #26
Meine Loks mit DCC Decoder fahren bei entsprechender Einstellung (Automatische Analog-/Digitalumschaltung) auch mit der PWM Spannung, ist das langfristig empfehlenswert, oder schadet dass den Decodern.
Es schadet den Decodern nicht, allerdings kommt nicht jeder Decoder damit klar. Je nach PWM-Frequenz, besonders bei PWM-Frequenzen um 10 kHz, ähnelt das Signal aus Sicht des Decoders einem Digitalsignal , einige Decoder wissen dann nicht so richtig was sie tun sollen.
- Stahlblauberlin
- Metropolitan (MET)
-
Beiträge: 3.356 Registriert am: 07.03.2022 Ort: Berlin Spurweite H0, Z, G Steuerung Roco digital, Z21-Nachbau Stromart DC, Digital, Analog
RE: PWM Fahrregler - Eigenbau
![]() #31 von
Hobbyprog
, 07.08.2023 15:29
#31 von
Hobbyprog
, 07.08.2023 15:29
Hallo,
habe gerade mit 12 Volt 121 Hz eine alte Fleischmann 6 Achsen vermutlich BR 103 002-2 mit Decoder von Uhlenbrock getestet,
Ich muss den Fahrpultschieber in Rocrail auf ca. 25% stellen damit die Lok sich bewegt. Meine analoge PIKO startet ab 20% .kann dann aber wieder ein wenig herunter regeln.
Die Fleischmann ruckelt dann bis 37% in regelmäßigen Takt (Schrittgeschwindigkeit) und fährt dann normal. Daher kann ich die Beobachtung von alexus bestätigen. Aber ich würde das auch nur als Notlösung sehen um z. B. eine Paradestecken von beiden Systemen zu nutzen. Wenn ich eine MOBA Anlage hätte
Stahlblauberlin
Danke für die Ausführlichen Informationen. Ich habe bis zu 8 Frequenzen zur zur Auswahl gestellt. Die können für 8 Loks bestimmt werden wenn man das so möchte. Das ist auch nur ein Hobbyprojekt und noch im Versuch. Aber die Loks fahren viel besser als mit einem Gleichstromtrafo. Das ist bei dem geringen Aufwand schon ein Erfolg.
Die Diskussion "Analog oder Digital" führt zu nichts. Das ist doch ein persönliche und rationale Entscheidung. Jeder soll mit seinem System zufrieden sein. Es kann aber nicht schaden offen für alles zu sein, bei machen springt dann der Funken in der einen oder anderen Richtung über. Am besten ist immer noch alles selber Ausprobieren.
Viele Grüße Martin
Zu dem Thema:
https://bluethners.de/DCCProjekt/Zentrale/DigitalTrafo.html
RE: PWM Fahrregler - Eigenbau
![]() #32 von
md95129
, 07.08.2023 15:34
#32 von
md95129
, 07.08.2023 15:34
Alexander,
Das Problem ist einfach, dass man selbst mit dem ausgefuchstesten (analogen) Fahrtregler keine so guten Fahreigenschaften wie mit einem Decoder + Puffer bekommt. Das hat nichts mit Vorlieben zu tun, das ist einfach technisch bedingt. Wenn man das akzeptiert, ist das Ok. Mir reicht das halt nicht. Es ist ja nicht so, dass ich nicht Jahre lang versucht habe, den optimalen analogen Regler zu bauen. Mein "Teichmann"-Regler, der damals in einigen Stückzahlen kommerziell vertrieben wurde, kommt dem sehr nahe, aber kann das Problem der Stromunterbrechungen (Plastik-Herzstücke) bei Kriechfahrt nicht lösen. Wer mit 100km/h über die Anlage brettert, hat da keine Probleme.
Gruss
Henner,
ex-Donkey Doktor der EDH Lumber
Schamlose Selbstbeweihräucherung: Eigenbauten eines alten Neulings.
US Waldbahnen/Echtdampf-Eigenbau
- md95129
- EuroCity (EC)
-
Beiträge: 1.083 Registriert am: 15.01.2017 Ort: Berlin Gleise IIm Echtdampf,H0m Steuerung DCC Eigenbau Stromart Digital
RE: PWM Fahrregler - Eigenbau
![]() #33 von
Stahlblauberlin
, 07.08.2023 16:29
#33 von
Stahlblauberlin
, 07.08.2023 16:29
Zitat von md95129 im Beitrag #32
Das Problem ist einfach, dass man selbst mit dem ausgefuchstesten (analogen) Fahrtregler keine so guten Fahreigenschaften wie mit einem Decoder + Puffer bekommt.
Das stimmt so nicht. Eine analog gut laufendes Triebfahrzeug wird mit einem ordentlichen analogen Fahrtregler (hier ruhig "Regler", da gibt's auch Lastregelung...) genauso gut laufen wie digitalisiert und mit Puffer. Letzteren braucht eine sinnig konstruierte Lok auch nicht, vor allem wenn man mal von den völlig starren Fahrwerken wegkommt und immer alle Räder auf der Schiene stehen können.
Eine Lok die nur mit Decoder und Puffer vernünftig läuft ist und bleibt eine Möhre, nur halt mit elektronischen Krücken.
- Stahlblauberlin
- Metropolitan (MET)
-
Beiträge: 3.356 Registriert am: 07.03.2022 Ort: Berlin Spurweite H0, Z, G Steuerung Roco digital, Z21-Nachbau Stromart DC, Digital, Analog
RE: PWM Fahrregler - Eigenbau
![]() #34 von
md95129
, 08.08.2023 06:53
#34 von
md95129
, 08.08.2023 06:53
Lieber Stahlblauberlin,
so sehr ich Deine Beiträge schätze, hier muss ich Dir energisch widersprechen. Ich beschäftige mich seit Jahrzehnten mit dem Selbstbau von Fahrzeugen und speziell deren Fahreigenschaften. Ich weiss also, wovon ich spreche. Ich habe auch Links angegeben, die zeigen, was möglich ist. Aber leider werden in diesem Forum Links offenbar nicht angeklickt bzw. nur der letzte Beitrag gelesen. Ohne jetzt auf meine Modelle einzugehen, wiederhole ich nochmal den Hinweis auf die hervorragenden Eigenbauten von Feldbahn-Freak, der letztendlich nach reinen Analogbauten auch zu dem Schluss gekommen ist, dass Decoder + Puffer für seine Winzlinge (und damit für alle kleinen Spuren/Loks) die beste Lösung ist. Hier wird nicht einer Möhre durch elektronischen Schnickschnack auf die Beine geholfen, sondern mit einer kleinen äusserst präzise gebauten Lok hervorragende Fahreigenschaften erzielt.
Gruss
Henner,
ex-Donkey Doktor der EDH Lumber
Schamlose Selbstbeweihräucherung: Eigenbauten eines alten Neulings.
US Waldbahnen/Echtdampf-Eigenbau
- md95129
- EuroCity (EC)
-
Beiträge: 1.083 Registriert am: 15.01.2017 Ort: Berlin Gleise IIm Echtdampf,H0m Steuerung DCC Eigenbau Stromart Digital
RE: PWM Fahrregler - Eigenbau
![]() #35 von
Petz1
, 08.08.2023 08:03
#35 von
Petz1
, 08.08.2023 08:03
Zitat von Stahlblauberlin im Beitrag #33Sorry aber da muß ich als Analogist der so ziemlich alles an analogen Reglern ausprobiert hat was der Markt so hergab ebenfalls Widerspruch einlegen. Gerade was die Langsamfahreigenschaften betrifft kommt keiner an das Steuerungsvermögen guter Decoder heran. Allerdings bedingt das bei den unterschiedlichen Motortypen individuelle CV - Anpassungen was mich bisher davon abhielt, statt den von mir aktuell verwendeten MRC Tech4 260 Fahrpulten Decoder außer am Testgleis als "Fahrpulte" zu nutzen indem man einfach den Decodermotorstrom ins Gleis schickt.
Ein analog gut laufendes Triebfahrzeug wird mit einem ordentlichen analogen Fahrtregler (hier ruhig "Regler", da gibt's auch Lastregelung...) genauso gut laufen wie digitalisiert und mit Puffer.
Grüße von Markus
Man muß im Leben für seine Erfahrungen bezahlen, wenn man Glück hat bekommt man manchmal Rabatt (Oskar Kokoschka)
- Petz1
- CityNightLine (CNL)
-
Beiträge: 1.978 Registriert am: 04.12.2020 Ort: Telfs Spurweite H0 Stromart DC, Analog
RE: PWM Fahrregler - Eigenbau
![]() #36 von
Stahlblauberlin
, 08.08.2023 12:06
#36 von
Stahlblauberlin
, 08.08.2023 12:06
Zitat von Petz1 im Beitrag #35
Sorry aber da muß ich als Analogist der so ziemlich alles an analogen Reglern ausprobiert hat was der Markt so hergab ebenfalls Widerspruch einlegen. Gerade was die Langsamfahreigenschaften betrifft kommt keiner an das Steuerungsvermögen guter Decoder heran.
Mal ein ACS 2000 von Roco ausprobiert? Und den technischen Zustand der Triebfahrzeuge beachtet? Mit dem ACS lassen sich selbst alte Lima-Motoren im Rahmen ihrer Möglichkeiten zivilisieren, mindesten so gut wie ESU oder Zimo-Decoder das mit ihrer wirklich guten Lastregelung schaffen. Ich fahre zwar fast rein digital, allerdings kommen bei mir Decoder erst dann in die Lokomotiven wenn sie analog einwandfrei laufen. Die Möglichkeiten von Decodern bezüglich der Motorsteuerung kaschieren oft einfach nur mechanische/motorentechnische Möhren oder einen schlechten Wartungsstand, letzteres begegnet mir gerade bei älteren, gebraucht erworbenen Modellen. "Läuft nicht/schlecht" in der Beschreibung, eine halbe Stunde putzen später erkennt man die Loks nicht wieder. Gerade bei älteren Fleischmann- und Märklin-Modellen begegnet mir das oft, irgendwie fahren tun die ja auch in erbärmlichsten Zustand noch.
Das ganze driftet jetzt aber deutlich vom Thema des Threads weg...
- Stahlblauberlin
- Metropolitan (MET)
-
Beiträge: 3.356 Registriert am: 07.03.2022 Ort: Berlin Spurweite H0, Z, G Steuerung Roco digital, Z21-Nachbau Stromart DC, Digital, Analog
RE: PWM Fahrregler - Eigenbau
![]() #37 von
Petz1
, 08.08.2023 12:35
#37 von
Petz1
, 08.08.2023 12:35
Natürlich wobei meiner Meinung nach das ältere ASC100 sogar besser als das neuere 2000er regelt. An meine MRC´s kommen die aber nicht ran (an Decoderregelungen schon gar nicht) und das beste Analogfahrpult für "Eselsmotoren" ála Lima ist für mich immer noch der gute alte Kleinbahn - Elektronictrafo da der die heftigste PWM - Regelung aufweist aber leider auch nicht an Zimo/ESU ranreicht.
Grüße von Markus
Man muß im Leben für seine Erfahrungen bezahlen, wenn man Glück hat bekommt man manchmal Rabatt (Oskar Kokoschka)
- Petz1
- CityNightLine (CNL)
-
Beiträge: 1.978 Registriert am: 04.12.2020 Ort: Telfs Spurweite H0 Stromart DC, Analog
RE: PWM Fahrregler - Eigenbau
![]() #38 von
tomholzwurm
, 12.08.2023 22:29
#38 von
tomholzwurm
, 12.08.2023 22:29
Ich finde die Diskussion sehr interessant, möchte nochmals anmerken:
Wir sprechen von zwei verschiedenen Dingen: analog oder digital fahren ist das eine.
Eine saubere Motorregelung ist das andere.
Ich unterstütze voll und ganz die These, die man auch leicht beweisen kann: für den perfekten Fahrregler spielt es erstmal keine Rolle, ob der im Fahrpult sitzt oder in der Lok.
Aber die Kontaktschwierigkeiten kann der Fahrregler in der Lok sprich der Dekoder viel leichter kompensieren.
Für mich das Paradebeispiel die Lenz Köf II, ohne den großen technischen Aufwand in dem Teil würde es nicht völlig problemlos über alle Weichen und Gleisunebenheiten laufen.
In H0 geschweige in kleineren Spuren kriegt man die erforderliche perfekte Kontaktsicherheit einfach nicht hin.
Wie gesagt, ich würde niemals jemanden missionieren wollen, aber ich weiss, warum ich auf eine digitale Lösung setze....
Gruß Thomas
- tomholzwurm
- InterRegio (IR)
-
Beiträge: 144 Registriert am: 27.05.2021

RE: PWM Fahrregler - Eigenbau
![]() #39 von
Hobbyprog
, 12.08.2023 23:07
#39 von
Hobbyprog
, 12.08.2023 23:07
Hallo Thomas,
ich habe das auch bei meinen Experimenten festgestellt. Im Kriechhang muss der Gleiskontakt absolut in Ordnung sein. Besonders, wenn nur wenige Achsen für den Gleiskontakt vorgesehen sind.Wahrscheinlich passiert das auch, wenn das Gleis nicht ganz eben verlegt wurde. Dann verliert ein Rad den Kontakt und da nützt auch kein Gleisputzen.
Ich habe meinen Regler auch mehr für Analogfahrer gedacht, welche die Loks nicht umbauen wollen, aber nicht auf eine PC-Steuerung verzicht möchten.
Ich habe das nur aus Experimentierfreude mal so programmiert. In der Grundversion schließt man den Dig. Trafo einfach am USB und kann mit wenigen Einstellungen in Rocrail eine Lok mit dem Regler fahren. Die Möglichkeit mit bis zu 8 Trafos die Blöcke zu schalten und auch noch DCC Decoder zu verwenden, ist etwas für experimentierfreudige. Wenn, man das auf die Spitze treibt, kann so auch ein automatischer Fahrbetrieb mit Rocrail gemacht werden. Das Programmieren in Rocrail XML Script erfordert aber einiges an Zeit. Aber ein Blockstreckenbetrieb mit Relais und Schalter muss auch erst mal gebaut werden. Die bis zu 8 Trafos werden einfach wie normale Trafos am Gleis angeschlossen, mehr nicht.
Zur Zeit habe ich Fahrstraßen mit Start und Ziel für den Gleisplan programmiert. Am Start wählt man den Regler z. B. Lok100, dann werden automatisch für die Lok die Trafos für den Fahrweg geschaltet. Im nächsten Schritt werde ich auch noch die Lok aus dem Startblock automatisch n dem Zielblock kopieren, wenn der R Melder am Ziel was meldet.
Ich denke, dass der Fahrregler von cRemE-fReSh auch eine prima Sache ist, falls man keine PC Steuerung mag. 
Viele Grüße Martin
-
- Ähnliche Themen
- Antworten
- Zugriffe
- Letzter Beitrag
-
- Zug der K.Bay.Sts.B. um 1850 H0-Eigenbau Modell
Erstellt im Forum Umbauten / Eigenbauten von Altmannshofer W - 13
- 2180
- Letzter Beitrag von
Bogie Holz-Metall

11.04.2024
- Zug der K.Bay.Sts.B. um 1850 H0-Eigenbau Modell
-
- Frage an die DC Experten: Unterschiede zwischen neuen und alten DC Trafo/Fahrreglern. Wie Startspannung reduzieren?
Erstellt im Forum Elektrik und Elektronik von Alex mont - 34
- 2610
- Letzter Beitrag von
Alex mont
06.11.2023
- Frage an die DC Experten: Unterschiede zwischen neuen und alten DC Trafo/Fahrreglern. Wie Startspannung reduzieren?
-
- Frage zu Piko Fahrregler 55003 ???
Erstellt im Forum Elektrik und Elektronik von Folkwang - 3
- 705
- Letzter Beitrag von
Folkwang
13.03.2023
- Frage zu Piko Fahrregler 55003 ???
-
- LGB Fahrregler wird heiss. Was mache ich falsch?
Erstellt im Forum Anfängerfragen von VolkerLGB - 1
- 416
- Letzter Beitrag von
Stahlblauberlin
12.12.2022
- LGB Fahrregler wird heiss. Was mache ich falsch?
-
- Märklin Fahrregler 11Volt?
Erstellt im Forum Kleine Spuren (Spur TT, N, Z) von Crash - 9
- 1061
- Letzter Beitrag von
volkerS
25.01.2022
- Märklin Fahrregler 11Volt?
-
- Welcher Trafo/Fahrregler ist gut?
Erstellt im Forum Anfängerfragen von - 19
- 4666
- Letzter Beitrag von
Dreispur
24.12.2020
- Welcher Trafo/Fahrregler ist gut?
-
- Analoger Fahrregler AC
Erstellt im Forum Elektrik und Elektronik von - 5
- 2280
- Letzter Beitrag von
alexus
01.06.2020
- Analoger Fahrregler AC
-
- Fragen zur RC Steuerung und Akkubetrieb für Spur 1 Eigenbau
Erstellt im Forum Elektrik und Elektronik von - 11
- 2504
- Letzter Beitrag von
md95129
11.03.2020
- Fragen zur RC Steuerung und Akkubetrieb für Spur 1 Eigenbau
-
- Erfahrungen zu Piko-, Tillig- und Fleischmann-Fahrreglern
Erstellt im Forum Elektrik und Elektronik von - 10
- 5218
- Letzter Beitrag von
86 1800-1
18.02.2014
- Erfahrungen zu Piko-, Tillig- und Fleischmann-Fahrreglern
